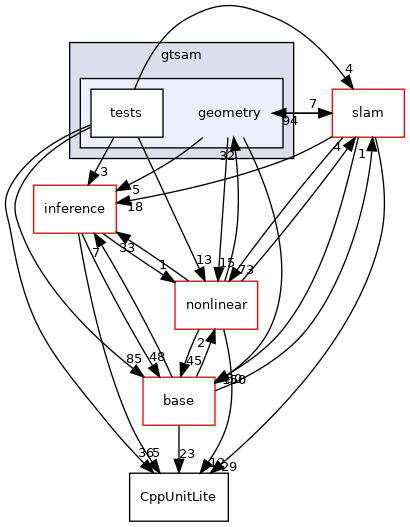
Directory dependency graph for geometry:
Directories | |
| directory | tests |
Files | |
| file | BearingRange.h [code] |
| Bearing-Range product. | |
| file | Cal3.cpp [code] |
| Common code for all calibration models. | |
| file | Cal3.h [code] |
| Common code for all Calibration models. | |
| file | Cal3_S2.cpp [code] |
| The most common 5DOF 3D->2D calibration. | |
| file | Cal3_S2.h [code] |
| The most common 5DOF 3D->2D calibration. | |
| file | Cal3_S2Stereo.cpp [code] |
| The most common 5DOF 3D->2D calibration + Stereo baseline. | |
| file | Cal3_S2Stereo.h [code] |
| The most common 5DOF 3D->2D calibration + Stereo baseline. | |
| file | Cal3Bundler.cpp [code] |
| file | Cal3Bundler.h [code] |
| Calibration used by Bundler. | |
| file | Cal3DS2.cpp [code] |
| file | Cal3DS2.h [code] |
| Calibration of a camera with radial distortion, calculations in base class Cal3DS2_Base. | |
| file | Cal3DS2_Base.cpp [code] |
| file | Cal3DS2_Base.h [code] |
| file | Cal3Fisheye.cpp [code] |
| file | Cal3Fisheye.h [code] |
| Calibration of a fisheye camera. | |
| file | Cal3Unified.cpp [code] |
| file | Cal3Unified.h [code] |
| Unified Calibration Model, see Mei07icra for details. | |
| file | CalibratedCamera.cpp [code] |
| Calibrated camera for which only pose is unknown. | |
| file | CalibratedCamera.h [code] |
| Calibrated camera for which only pose is unknown. | |
| file | CameraSet.h [code] |
| Base class to create smart factors on poses or cameras. | |
| file | geometry/concepts.h [code] |
| file | Cyclic.cpp [code] |
| Cyclic group implementation. | |
| file | Cyclic.h [code] |
| Cyclic group, i.e., the integers modulo N. | |
| file | EssentialMatrix.cpp [code] |
| file | EssentialMatrix.h [code] |
| file | Line3.cpp [code] |
| file | Line3.h [code] |
| 4 dimensional manifold of 3D lines | |
| file | OrientedPlane3.cpp [code] |
| file | OrientedPlane3.h [code] |
| file | PinholeCamera.h [code] |
| Base class for all pinhole cameras. | |
| file | PinholePose.h [code] |
| Pinhole camera with known calibration. | |
| file | PinholeSet.h [code] |
| A CameraSet of either CalibratedCamera, PinholePose, or PinholeCamera. | |
| file | Point2.cpp [code] |
| 2D Point | |
| file | Point2.h [code] |
| 2D Point | |
| file | Point3.cpp [code] |
| 3D Point | |
| file | Point3.h [code] |
| 3D Point | |
| file | Pose2.cpp [code] |
| 2D Pose | |
| file | Pose2.h [code] |
| 2D Pose | |
| file | Pose3.cpp [code] |
| 3D Pose | |
| file | Pose3.h [code] |
| 3D Pose | |
| file | geometry/Quaternion.h [code] |
| file | Rot2.cpp [code] |
| 2D Rotations | |
| file | Rot2.h [code] |
| 2D rotation | |
| file | Rot3.cpp [code] |
| Rotation, common code between Rotation matrix and Quaternion. | |
| file | Rot3.h [code] |
| 3D rotation represented as a rotation matrix or quaternion | |
| file | Rot3M.cpp [code] |
| Rotation (internal: 3*3 matrix representation*) | |
| file | Rot3Q.cpp [code] |
| Rotation (internal: quaternion representation*) | |
| file | Similarity2.cpp [code] |
| Implementation of Similarity2 transform. | |
| file | Similarity2.h [code] |
| Implementation of Similarity2 transform. | |
| file | Similarity3.cpp [code] |
| Implementation of Similarity3 transform. | |
| file | Similarity3.h [code] |
| Implementation of Similarity3 transform. | |
| file | SimpleCamera.h [code] |
| A simple camera class with a Cal3_S2 calibration. | |
| file | SO3.cpp [code] |
| 3*3 matrix representation of SO(3) | |
| file | SO3.h [code] |
| 3*3 matrix representation of SO(3) | |
| file | SO4.cpp [code] |
| 4*4 matrix representation of SO(4) | |
| file | SO4.h [code] |
| 4*4 matrix representation of SO(4) | |
| file | SOn-inl.h [code] |
| Template implementations for SO(n) | |
| file | SOn.cpp [code] |
| Definitions of dynamic specializations of SO(n) | |
| file | SOn.h [code] |
| N*N matrix representation of SO(N). N can be Eigen::Dynamic. | |
| file | SphericalCamera.cpp [code] |
| file | SphericalCamera.h [code] |
| Calibrated camera with spherical projection. | |
| file | StereoCamera.cpp [code] |
| file | StereoCamera.h [code] |
| A Stereo Camera based on two Simple Cameras. | |
| file | StereoPoint2.cpp [code] |
| file | StereoPoint2.h [code] |
| A 2D stereo point (uL,uR,v) | |
| file | triangulation.cpp [code] |
| file | triangulation.h [code] |
| Functions for triangulation. | |
| file | Unit3.cpp [code] |
| file | Unit3.h [code] |