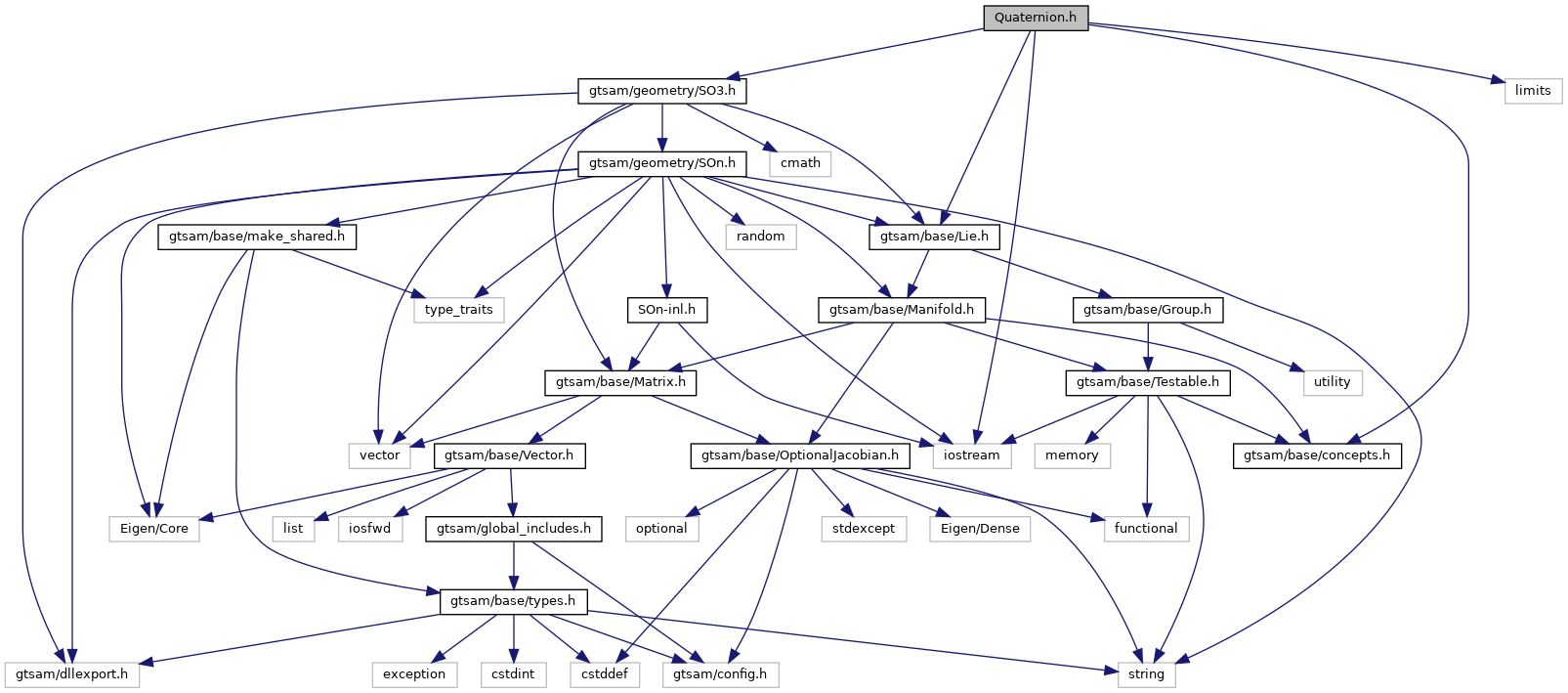
#include <gtsam/base/Lie.h>#include <gtsam/base/concepts.h>#include <gtsam/geometry/SO3.h>#include <limits>#include <iostream>
Include dependency graph for geometry/Quaternion.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | gtsam::traits< QUATERNION_TYPE > |
Namespaces | |
| gtsam | |
| traits | |
Macros | |
| #define | QUATERNION_TYPE Eigen::Quaternion<_Scalar,_Options> |
Typedefs | |
| typedef Eigen::Quaternion< double, Eigen::DontAlign > | gtsam::Quaternion |
Macro Definition Documentation
◆ QUATERNION_TYPE
| #define QUATERNION_TYPE Eigen::Quaternion<_Scalar,_Options> |
Definition at line 26 of file geometry/Quaternion.h.