Implementation of Similarity2 transform. More...
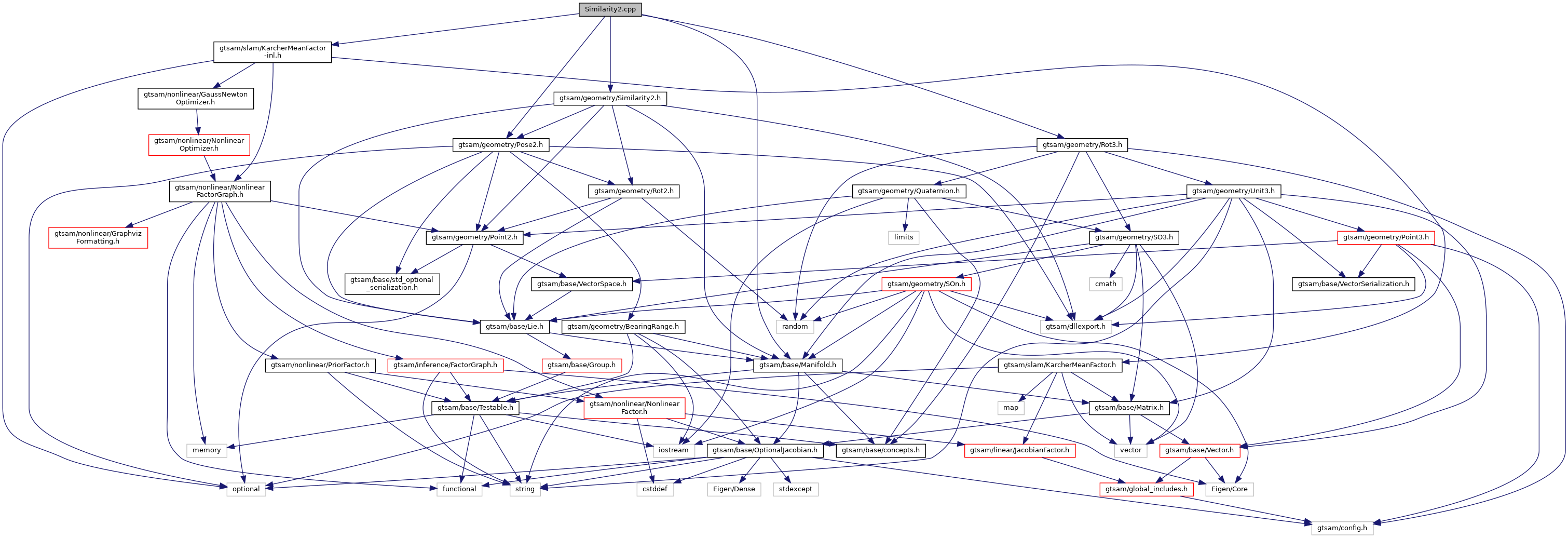
#include <gtsam/base/Manifold.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/geometry/Similarity2.h>#include <gtsam/slam/KarcherMeanFactor-inl.h>
Include dependency graph for Similarity2.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::internal | |
Functions | |
| static Similarity2 | gtsam::internal::Align (const Point2Pairs &d_abPointPairs, const Rot2 &aRb, const Point2Pair ¢roids) |
| This method estimates the similarity transform from differences point pairs, given a known or estimated rotation and point centroids. More... | |
| static Similarity2 | gtsam::internal::AlignGivenR (const Point2Pairs &abPointPairs, const Rot2 &aRb) |
| This method estimates the similarity transform from point pairs, given a known or estimated rotation. Refer to: http://www5.informatik.uni-erlangen.de/Forschung/Publikationen/2005/Zinsser05-PSR.pdf Chapter 3. More... | |
| static Matrix2 | gtsam::internal::CalculateH (const Point2Pairs &d_abPointPairs) |
| Form outer product H. More... | |
| static double | gtsam::internal::CalculateScale (const Point2Pairs &d_abPointPairs, const Rot2 &aRb) |
| Form inner products x and y and calculate scale. More... | |
| std::ostream & | gtsam::operator<< (std::ostream &os, const Similarity2 &p) |
| static Point2Pairs | gtsam::internal::SubtractCentroids (const Point2Pairs &abPointPairs, const Point2Pair ¢roids) |
| Subtract centroids from point pairs. More... | |
Detailed Description
Implementation of Similarity2 transform.
Definition in file Similarity2.cpp.