#include <YouBotJointParameterReadOnly.hpp>
Public Member Functions | |
| virtual void | toString (std::string &value)=0 |
| virtual | ~YouBotJointParameterReadOnly () |
Protected Member Functions | |
| virtual std::string | getName () const =0 |
| virtual ParameterType | getType () const =0 |
| virtual void | getYouBotMailboxMsg (YouBotSlaveMailboxMsg &message, TMCLCommandNumber msgType, const YouBotJointStorage &storage) const =0 |
| virtual void | setYouBotMailboxMsg (const YouBotSlaveMailboxMsg &message, const YouBotJointStorage &storage)=0 |
| YouBotJointParameterReadOnly () | |
Protected Attributes | |
| std::string | name |
| ParameterType | parameterType |
Friends | |
| class | YouBotJoint |
Detailed Description
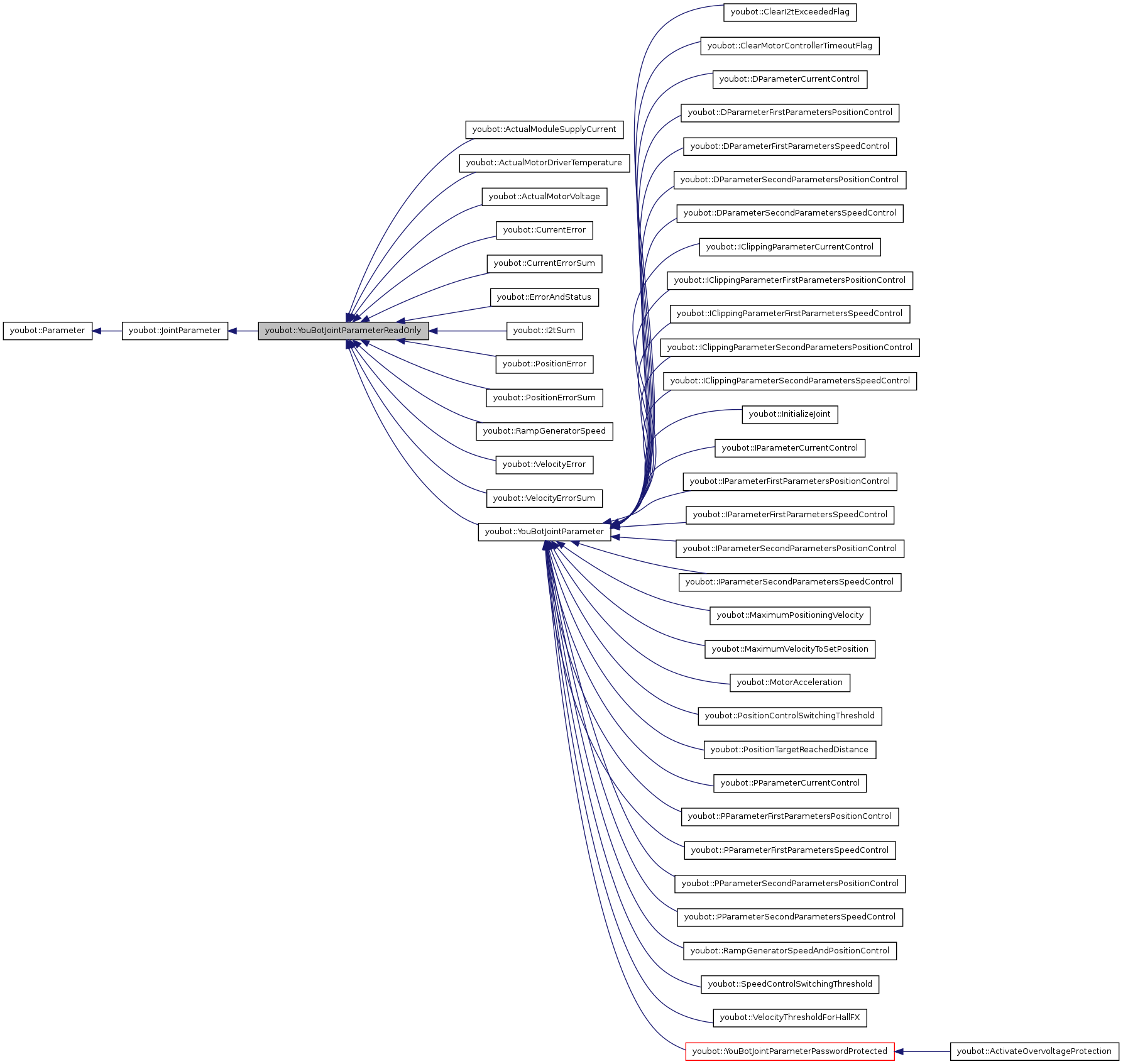
abstract youBot joint parameter which can be read only
Definition at line 71 of file YouBotJointParameterReadOnly.hpp.
Constructor & Destructor Documentation
Definition at line 55 of file YouBotJointParameterReadOnly.cpp.
Definition at line 61 of file YouBotJointParameterReadOnly.cpp.
Member Function Documentation
| virtual std::string youbot::YouBotJointParameterReadOnly::getName | ( | ) | const [protected, pure virtual] |
Implemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::PositionError, youbot::ApproveProtectedParameters, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::YouBotJointParameter, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, and youbot::YouBotJointParameterPasswordProtected.
| virtual ParameterType youbot::YouBotJointParameterReadOnly::getType | ( | ) | const [protected, pure virtual] |
Implemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::PositionError, youbot::ApproveProtectedParameters, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::ActivateOvervoltageProtection, youbot::YouBotJointParameter, youbot::ActualMotorVoltage, and youbot::YouBotJointParameterPasswordProtected.
| virtual void youbot::YouBotJointParameterReadOnly::getYouBotMailboxMsg | ( | YouBotSlaveMailboxMsg & | message, |
| TMCLCommandNumber | msgType, | ||
| const YouBotJointStorage & | storage | ||
| ) | const [protected, pure virtual] |
Implemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::PositionError, youbot::ApproveProtectedParameters, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::YouBotJointParameter, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, and youbot::YouBotJointParameterPasswordProtected.
| virtual void youbot::YouBotJointParameterReadOnly::setYouBotMailboxMsg | ( | const YouBotSlaveMailboxMsg & | message, |
| const YouBotJointStorage & | storage | ||
| ) | [protected, pure virtual] |
Implemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::PositionError, youbot::ApproveProtectedParameters, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::YouBotJointParameter, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, and youbot::YouBotJointParameterPasswordProtected.
| virtual void youbot::YouBotJointParameterReadOnly::toString | ( | std::string & | value | ) | [pure virtual] |
Implemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::PositionError, youbot::ApproveProtectedParameters, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::YouBotJointParameter, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, and youbot::YouBotJointParameterPasswordProtected.
Friends And Related Function Documentation
friend class YouBotJoint [friend] |
Reimplemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::PositionError, youbot::ApproveProtectedParameters, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::YouBotJointParameter, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, and youbot::YouBotJointParameterPasswordProtected.
Definition at line 73 of file YouBotJointParameterReadOnly.hpp.
Member Data Documentation
std::string youbot::YouBotJointParameterReadOnly::name [protected] |
Reimplemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::ApproveProtectedParameters, youbot::PositionError, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, youbot::YouBotJointParameter, and youbot::YouBotJointParameterPasswordProtected.
Definition at line 92 of file YouBotJointParameterReadOnly.hpp.
Reimplemented in youbot::ClearMotorControllerTimeoutFlag, youbot::ClearI2tExceededFlag, youbot::PositionTargetReachedDistance, youbot::MaximumVelocityToSetPosition, youbot::IClippingParameterCurrentControl, youbot::DParameterCurrentControl, youbot::IParameterCurrentControl, youbot::PParameterCurrentControl, youbot::IClippingParameterSecondParametersSpeedControl, youbot::DParameterSecondParametersSpeedControl, youbot::IParameterSecondParametersSpeedControl, youbot::PParameterSecondParametersSpeedControl, youbot::IClippingParameterSecondParametersPositionControl, youbot::MotorHaltedVelocity, youbot::DParameterSecondParametersPositionControl, youbot::ThermalWindingTimeConstant, youbot::IParameterSecondParametersPositionControl, youbot::StopSwitchPolarity, youbot::PParameterSecondParametersPositionControl, youbot::SineInitializationVelocity, youbot::IClippingParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroOnlyOnce, youbot::DParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextSwitch, youbot::IParameterFirstParametersSpeedControl, youbot::SetEncoderCounterZeroAtNextNChannel, youbot::PParameterFirstParametersSpeedControl, youbot::ReversingEncoderDirection, youbot::IClippingParameterFirstParametersPositionControl, youbot::PIDControlTime, youbot::DParameterFirstParametersPositionControl, youbot::OperationalTime, youbot::IParameterFirstParametersPositionControl, youbot::MotorPoles, youbot::PParameterFirstParametersPositionControl, youbot::MotorControllerTimeout, youbot::VelocityThresholdForHallFX, youbot::MotorCoilResistance, youbot::SpeedControlSwitchingThreshold, youbot::MaximumMotorCurrent, youbot::PositionControlSwitchingThreshold, youbot::MassInertiaConstant, youbot::RampGeneratorSpeedAndPositionControl, youbot::InitSineDelay, youbot::MotorAcceleration, youbot::InitializationMode, youbot::MaximumPositioningVelocity, youbot::I2tLimit, youbot::I2tExceedCounter, youbot::ActualModuleSupplyCurrent, youbot::HallSensorPolarityReversal, youbot::ActualMotorDriverTemperature, youbot::EncoderStopSwitch, youbot::I2tSum, youbot::RampGeneratorSpeed, youbot::EncoderResolution, youbot::CurrentErrorSum, youbot::CurrentControlLoopDelay, youbot::CurrentError, youbot::CommutationMotorCurrent, youbot::VelocityErrorSum, youbot::CommutationMode, youbot::VelocityError, youbot::BEMFConstant, youbot::PositionErrorSum, youbot::ApproveProtectedParameters, youbot::PositionError, youbot::InitializeJoint, youbot::ErrorAndStatus, youbot::ActualCommutationOffset, youbot::ActivateOvervoltageProtection, youbot::ActualMotorVoltage, youbot::YouBotJointParameter, and youbot::YouBotJointParameterPasswordProtected.
Definition at line 94 of file YouBotJointParameterReadOnly.hpp.
The documentation for this class was generated from the following files: