Software Overview
The sick_scan_xd software is essentially affected by its use cases:
Implement the common tasks for different lidars:
Provide driver software on Linux and Windows, generic, ROS-1 and ROS-2
Receive and convert scan data, publish pointcloud
Run startup, configuration and setup
Use cases:
Provide a pointcloud to the customer/application
Provide a common highlevel interface for all supported lidars
Hide datagram details, encodings and parsing knowhow
The most common use case is to run lidar + sick_scan_xd to get a pointcloud.
Software requirements:
Support different lidars (LMS, LRS, LDMRS, MRS, NAV, TiM, RMS, multiScan, etc.)
Support different OS (Linux, Windows)
Support different targets (ROS-1, ROS-2, generic)
Support different protocols (Cola-A, Cola-B, TCP, UDP, msgpack)
Implement parser for different telegrams (scandata, scancfg, fields, etc.)
This overview describes the most important modules and their relationship.
Software structure
The following figures show the most important software blocks:
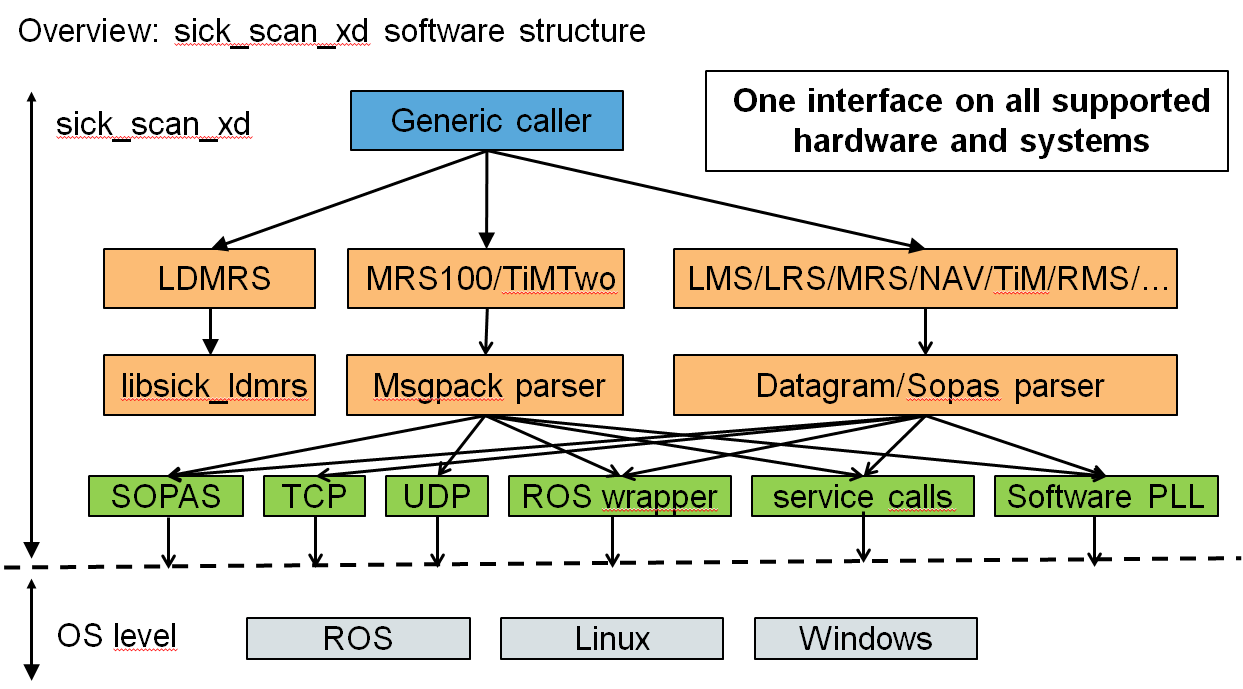
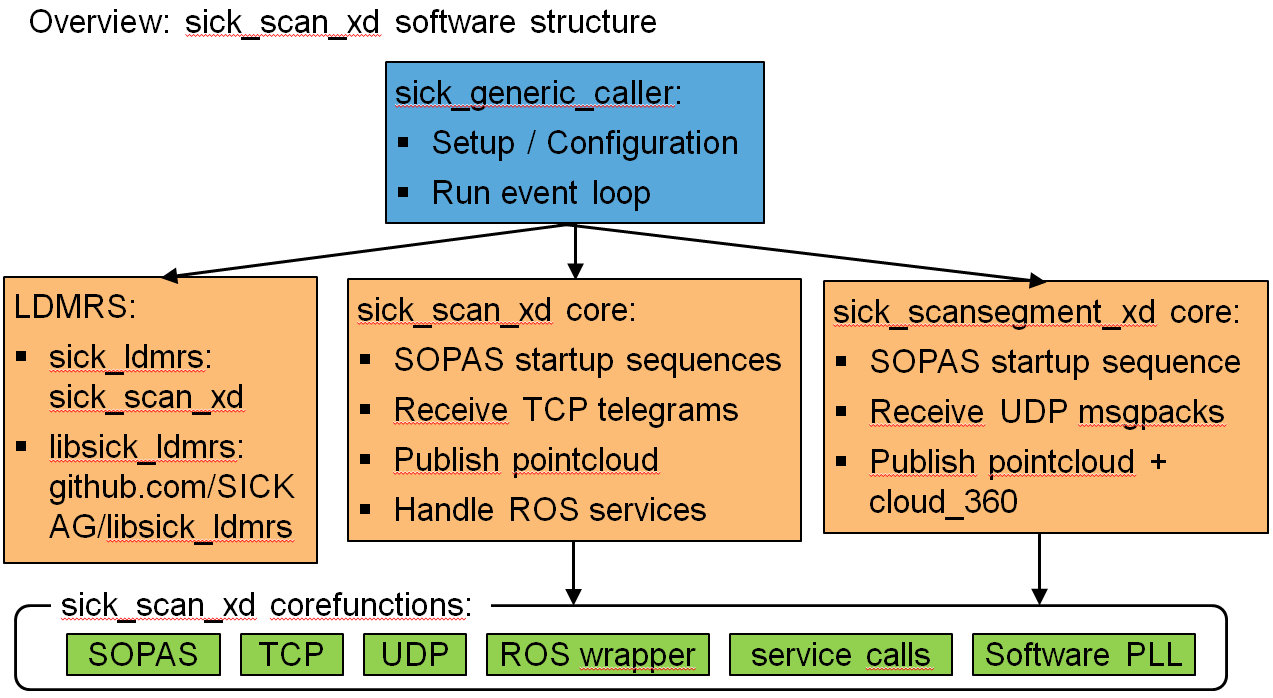
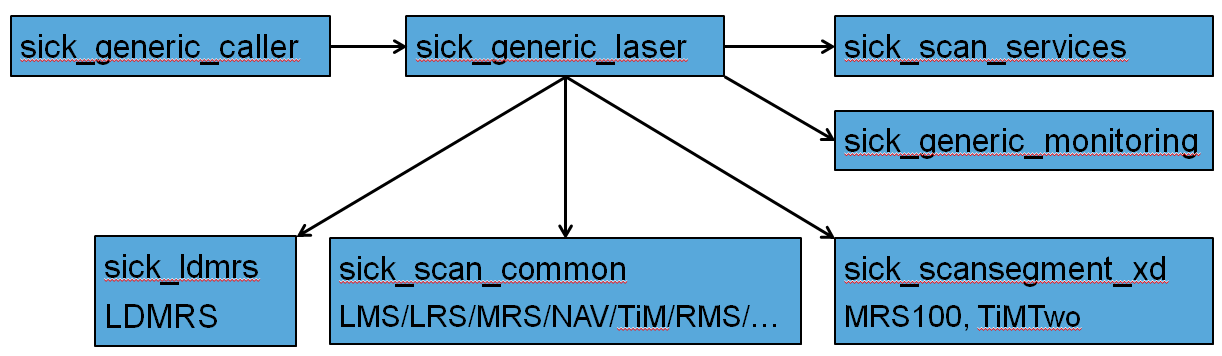
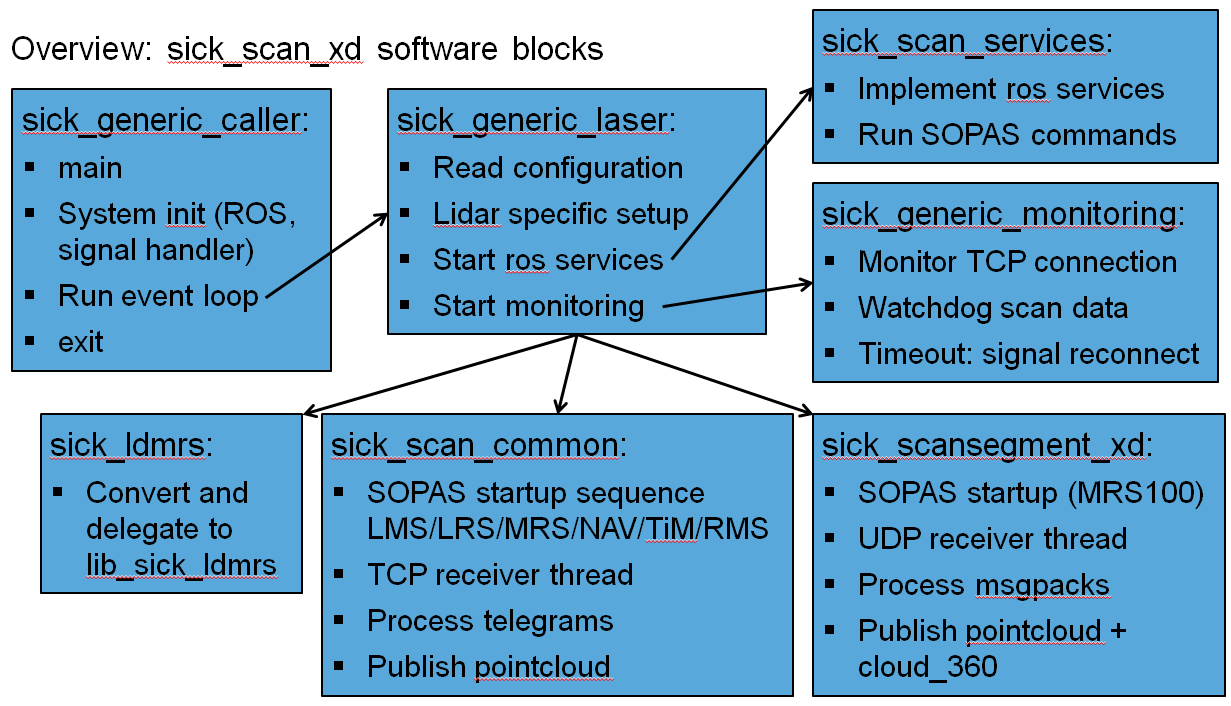
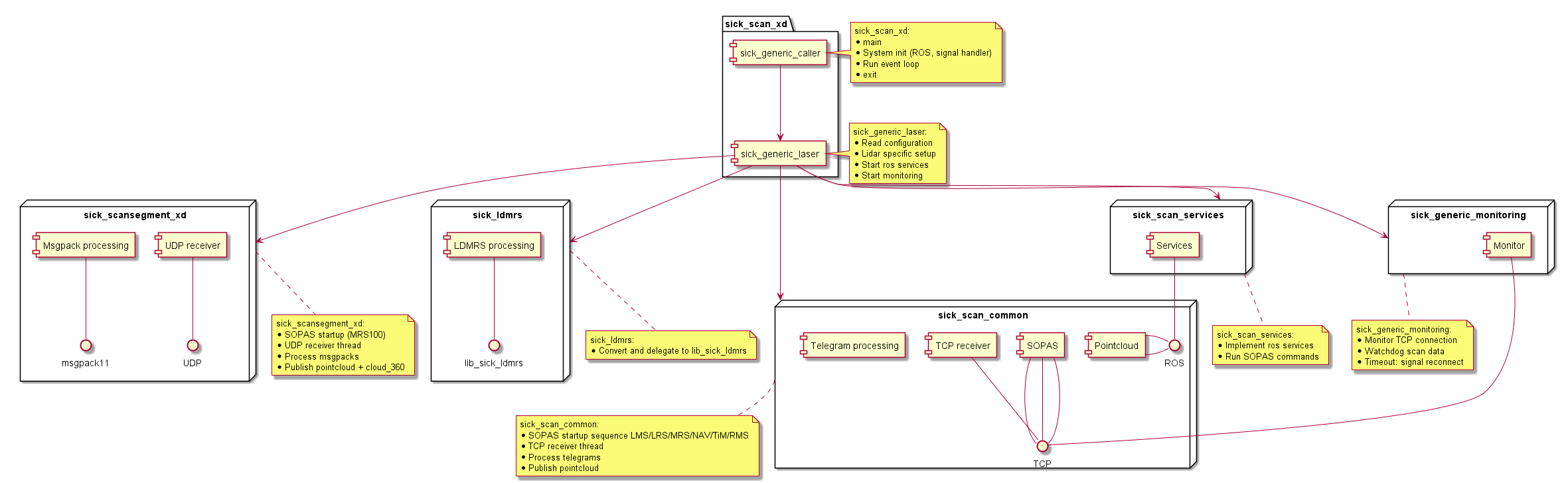
sick_scan_xd contains 6 main functional blocks:
sick_generic_caller and sick_generic_laser for initialization and setup:
Read configuration from launchfile:
ROS1:
ros::NodeHandle::getParamROS2 and generic:
LaunchParser(ros-wrapper)
Lidar specific setup:
class
sick_scan_xd::SickGenericParser: lidar specific properties and messages parsingSet and get lidar specific properties: number of layers, angular resolution, etc.
Parse and convert scan data, input: scan data (ascii or binary datagram), output:
ros::sensor_msgs::LaserScanclass
sick_scan_xd::SickScanCommonTcp: receive TCP messages, convert and publish pointcloud
Start ros services:
class
sick_scan_xd::SickScanServices: register ros services, convert from/to SOPAS
Start monitoring:
class
sick_scan_xd::SickScanMonitor: monitor scan data, reinit on timeoutclass
sick_scan_xd::PointCloudMonitor: monitor pointcloud, reinit on timeout
sick_scan_common for the most common lidar devices (LMS, LRS, MRS, NAV, TiM, RMS, etc.):
Implemention by SickScanCommon and SickScanCommonTcp
Uses SickGenericParser for lidar specific properties and parsing
Runs common tasks for LMS/LRS/MRS/NAV/TiM/RMS:
Run SOPAS startup sequence
Run TCP receiver thread
Process telegrams: parse and convert to pointcloud
Publish pointcloud
sick_ldmrs for LDMRS support using the ldmrs-library from https://github.com/SICKAG/libsick_ldmrs.git
sick_scansegment_xd for multiScan136 and picoScan150 lidars using SOPAS, msgpack and UDP-communication
sick_scan_services for ros services
sick_generic_monitoring for monitoring and re-initialization in case of errors (e.g. network errors).
The following figures show these 6 functional blocks:
The function blocks depend on and use the underlying system (ROS, TCP, etc.):
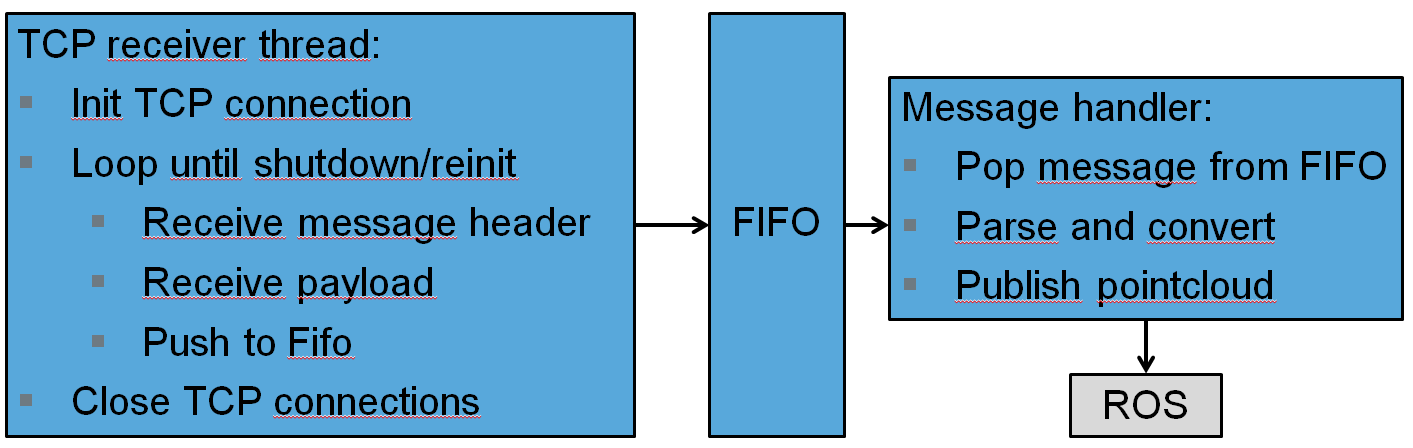
Message receiving and message handling
Message receiving and message handling are decoupled, i.e. both tasks run in separate thread and exchange messages via a FIFO-buffer. This way, message handling cannot block tcp recv and vice versa. The following figure shows the message handling:
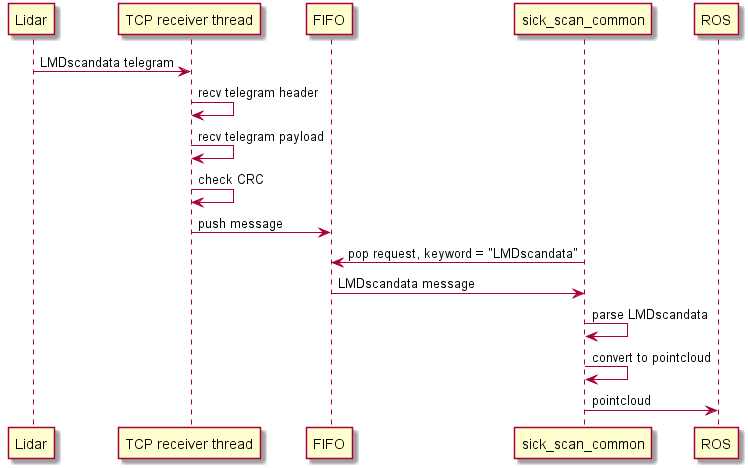
The following figure shows the sequence diagram for a LMDscandata telegram:
Incoming TCP messages and exported pointcloud messages are monitored. sick_scan_xd reinitialises the lidar and the tcp connection in case of timeouts.
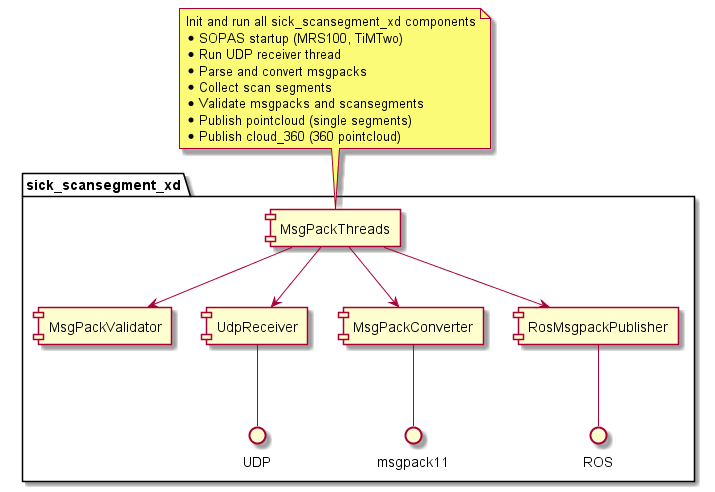
sick_scansegment_xd
sick_scansegment_xd implements support for multiScan136 and picoScan150 lidars using SOPAS, msgpack and UDP-communication. It has 5 functional blocks:
class
sick_scansegment_xd::MsgPackThreads:Init and run all sick_scansegment_xd components
SOPAS startup (multiScan136, picoScan150)
class
sick_scansegment_xd::UdpReceiver:Run UDP receiver thread
class
sick_scansegment_xd::MsgPackConverter:Parse and convert msgpacks
Collect scan segments
class
sick_scansegment_xd::MsgPackValidator:Validate msgpacks and scansegments
class
sick_scansegment_xd::RosMsgpackPublisher:Publish pointcloud (single segments)
Publish cloud_fullframe (fullframe pointcloud, 360 deg for Multiscan136 resp. 270 deg for picoscan)
The following figure shows the compoenent diagram for sick_scansegment_xd:
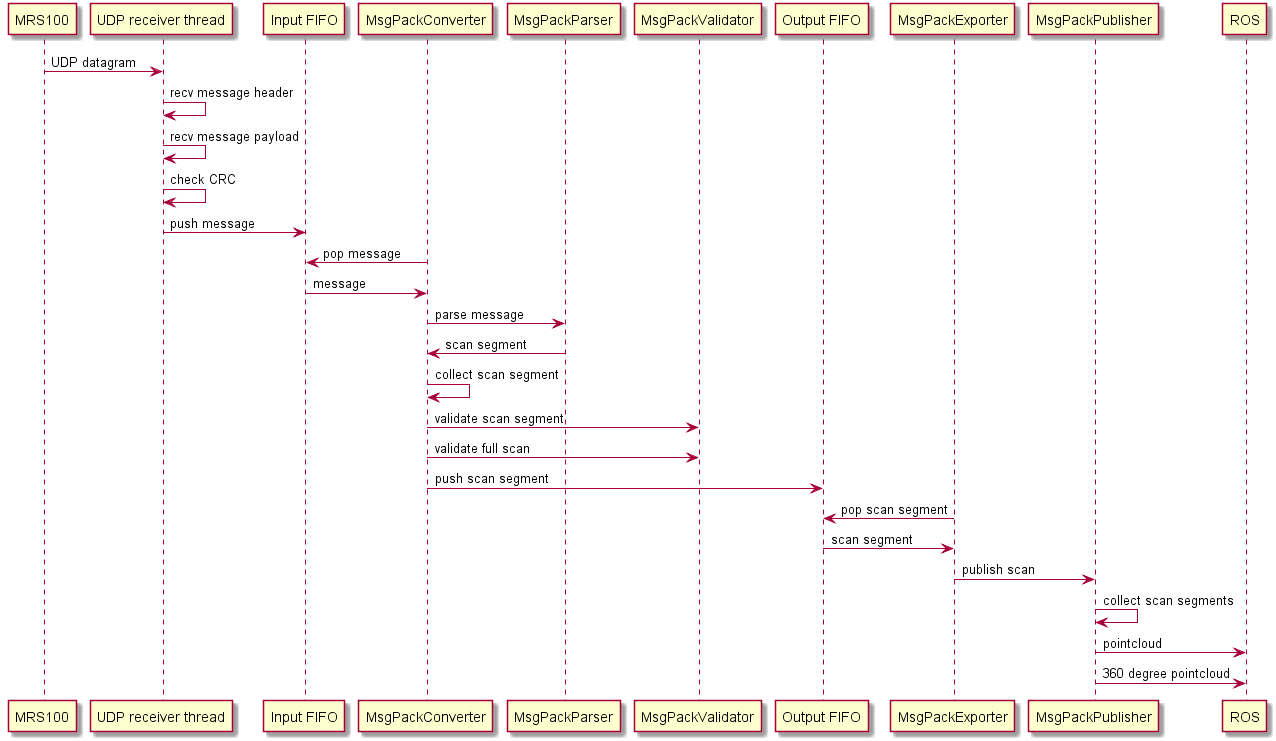
Message receiving, converting and publishing run in 3 separate threads and exchange their messages via a FIFO-buffer.
The following figure shows the sequence diagram for a multiScan136 msgpacks:
Files and folders
The source files for the sick_scan_xd core can be found in the following folders:
driver/src: source files
include: header files
launch: configuration
msg: ros messages definitions
srv: ros services definitions
roswrap: ros wrapper (ROS-2 and generic)
These folders are required to build sick_generic_caller.
Besides README.md and CHANGELOG.md, all documentation can be found in the doc folder.
Additional folders for sick_scan_xd support, development and test are:
test: test scripts and emulator
tools: additional development tools