Google Cartographer
Table of contents
Supported Hardware
Setup
Setup Google Cartographer (these steps are for illustration only, you must adapt these lines to your local directory names)
Login to Ubuntu.
Open multiple terminals.
Terminal 1: . ros1_start.sh roscore
Terminal 2: . ros1_start.sh cd ~/ros_catkin_ws source ./devel/setup.bash
Terminal 3: roslaunch sick_scan_xd sick_mrs_1xxx_cartographer.launch cloud_topic:=horizontal_laser_3d frame_id:=horizontal_vlp16_link
Terminal 4: roslaunch sick_scan_xd sick_tim_5xx.launch cloud_topic:=vertical_laser_3d frame_id:=vertical_vlp16_link hostname:=192.168.0.71
Terminal 5:
. ros1_start.sh
cd ~/ros_cartographer_ws
source ./install_isolated/setup.bash
catkin_make_isolated
roslaunch cartographer_ros live_demo_backpack_3d.launch
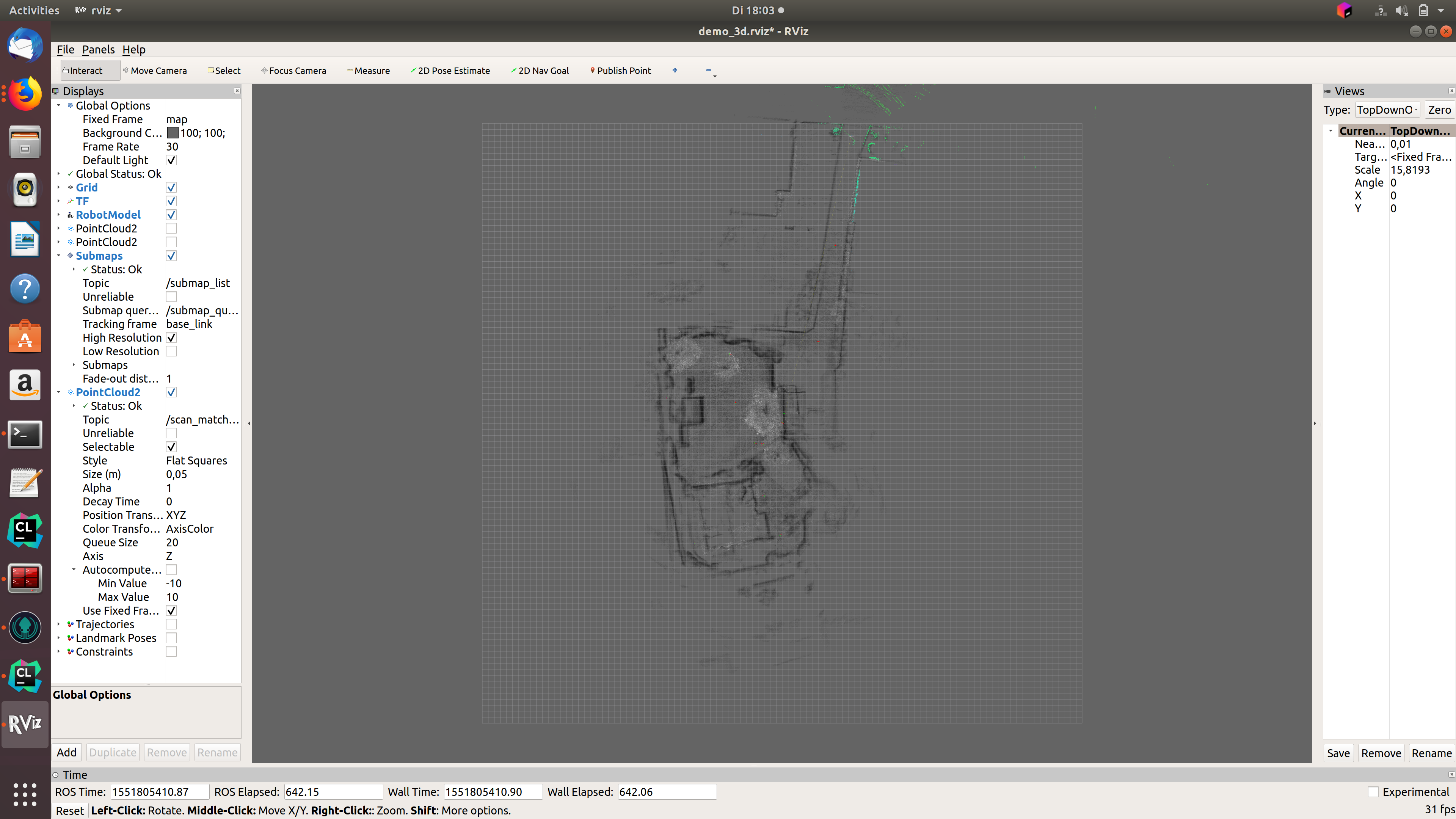
Example output
The following figure shows an example of an outdoor slam result using a MRS1104-scanner: