Class PlatformStateMachine
Defined in File platform_state_machine.hpp
Class Documentation
-
class PlatformStateMachine
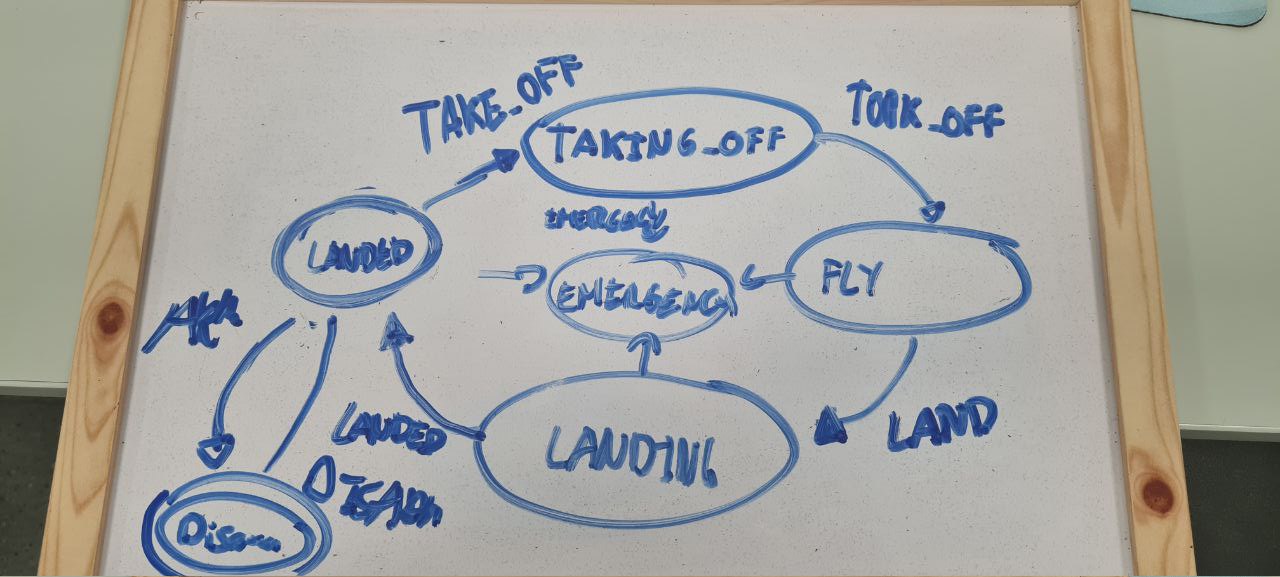
This class implements the Platform State Machine, which is in charge of handling the state of the platform using a FSM (Finite State Machine). This state machine consist on 6 states:
DISARMED -> The platform is not armed.
LANDED -> The platform is armed and landed.
TAKING_OFF -> The platform is taking off.
FLYING -> The platform is on air.
LANDING -> The platform is landing.
EMERGENCY -> The platform is in emergency mode.
The events that can trigger the state machine are:
ARM
DISARM
TAKE_OFF
TOOK_OFF
LAND
LANDED
EMERGENCY TODO(miferco97): add figure of the state machine
Public Functions
-
explicit PlatformStateMachine(as2::Node *node)
Constructor of the Platform State Machine.
- Parameters:
node_ptr – Pointer to an aerostack2 node.
-
~PlatformStateMachine()
-
bool processEvent(const int8_t &event)
This function is in charge of handling the state machine.
- Parameters:
event – The event that triggers the state machine.
- Returns:
true If the event is valid in current State.
-
bool processEvent(const Event &event)
This function is in charge of handling the state machine.
- Parameters:
event – The event that triggers the state machine.
- Returns:
true If the event is valid in current State.
-
StateMachineTransition getTransition(const int8_t ¤t_state, const int8_t &event)
Get the Transition object.
- Parameters:
current_state –
event –
- Returns:
-
inline as2_msgs::msg::PlatformStatus getState()
This function returns the current state of the state machine.
- Returns:
The current Platform Status of the state machine
-
inline void setState(as2_msgs::msg::PlatformStatus state)
Set the State of the FSM to the desired state. (THIS MAY BE USED ONLY FOR TESTING PURPOSES)
- Parameters:
state –
-
inline void setState(const int8_t &state)