Test data provider/loader
General information
Use as little as possible test points (Reason: Reduces maintenance overhead).
Test points should be defined following the concept shown below.

Test points can be defined in joint space or Cartesian space. However, one test point should not be defined in both spaces (data redundancy)
If a test point is defined in Cartesian space, then also state the corresponding seed.
Store preferably only valid test points and test commands. You can use the valid test points and test commands to create invalid test points or commands if needed (Reason: Reduces maintenance overhead).
Diagrams/ Data types
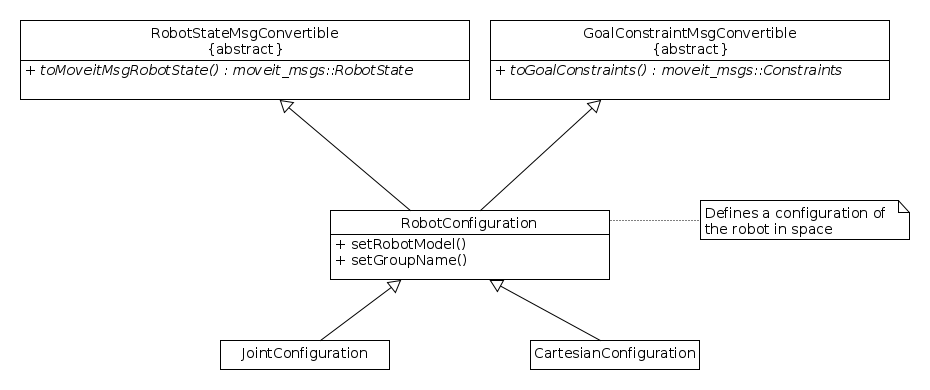
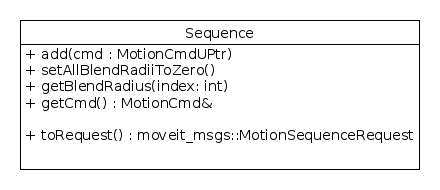
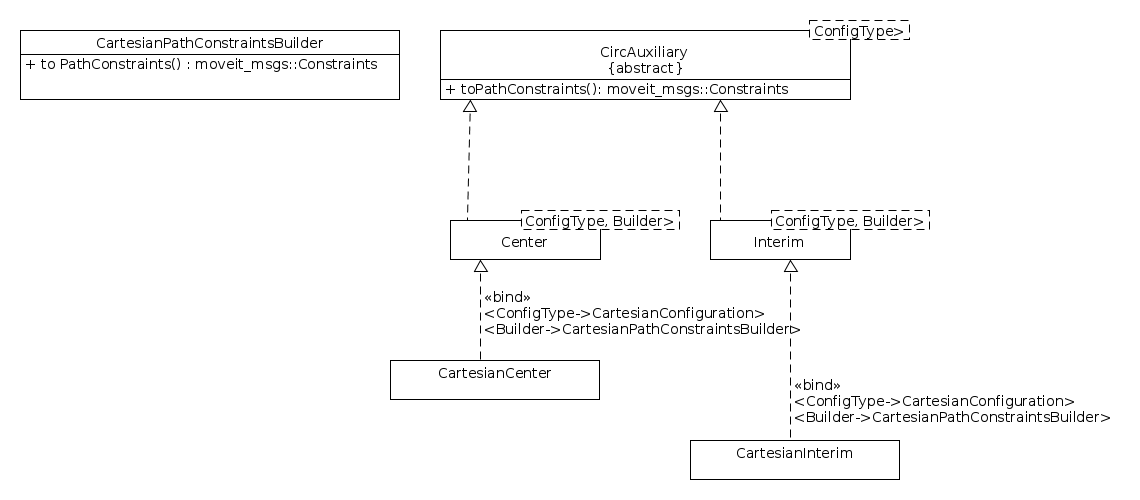
The following diagrams show the main classes which can be loaded from the test data provider/loader, and the relationship between them.
Robot configurations
Command types
Circ auxiliary types
Usage
The usage of the TestDataLoader is as shown below.
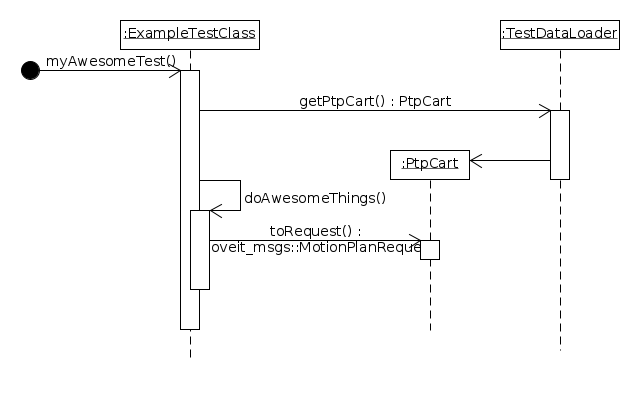
The idea is that the TestdataLoader returns high level data abstraction classes which can then directly be used to generate/build the ROS messages needed for testing.