Getting Started with OpenCV
Displaying Color Frame
In this demo, you will acquire color frame from the RealSense camera and display it using OpenCV. Before you start, make sure you have librealsense and OpenCV installed and working properly on your system. Using the editor of your choice create BGR_sample.cpp and copy-paste the following code-snippet:
// include the librealsense C++ header file
#include <librealsense2/rs.hpp>
// include OpenCV header file
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
//Contruct a pipeline which abstracts the device
rs2::pipeline pipe;
//Create a configuration for configuring the pipeline with a non default profile
rs2::config cfg;
//Add desired streams to configuration
cfg.enable_stream(RS2_STREAM_COLOR, 640, 480, RS2_FORMAT_BGR8, 30);
//Instruct pipeline to start streaming with the requested configuration
pipe.start(cfg);
// Camera warmup - dropping several first frames to let auto-exposure stabilize
rs2::frameset frames;
for(int i = 0; i < 30; i++)
{
//Wait for all configured streams to produce a frame
frames = pipe.wait_for_frames();
}
//Get each frame
rs2::frame color_frame = frames.get_color_frame();
// Creating OpenCV Matrix from a color image
Mat color(Size(640, 480), CV_8UC3, (void*)color_frame.get_data(), Mat::AUTO_STEP);
// Display in a GUI
namedWindow("Display Image", WINDOW_AUTOSIZE );
imshow("Display Image", color);
waitKey(0);
return 0;
}
Compile and run the application from terminal using the following command line:
g++ -std=c++11 BGR_sample.cpp -lrealsense2 -lopencv_core -lopencv_highgui -o BGR && ./BGR
Result:

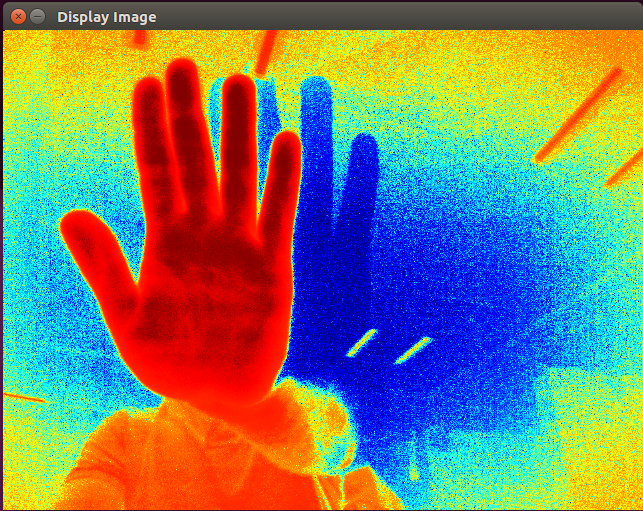
Displaying Infrared Frame
Displaying Infrared and Depth data is not very different from Color data. Infrared frame is a single channel, 8 bits-per-pixel image. Copy the following code snippet into IR_sample.cpp:
// include the librealsense C++ header file
#include <librealsense2/rs.hpp>
// include OpenCV header file
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
//Contruct a pipeline which abstracts the device
rs2::pipeline pipe;
//Create a configuration for configuring the pipeline with a non default profile
rs2::config cfg;
//Add desired streams to configuration
cfg.enable_stream(RS2_STREAM_INFRARED, 640, 480, RS2_FORMAT_Y8, 30);
cfg.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30);
//Instruct pipeline to start streaming with the requested configuration
pipe.start(cfg);
// Camera warmup - dropping several first frames to let auto-exposure stabilize
rs2::frameset frames;
for(int i = 0; i < 30; i++)
{
//Wait for all configured streams to produce a frame
frames = pipe.wait_for_frames();
}
//Get each frame
rs2::frame ir_frame = frames.first(RS2_STREAM_INFRARED);
rs2::frame depth_frame = frames.get_depth_frame();
// Creating OpenCV matrix from IR image
Mat ir(Size(640, 480), CV_8UC1, (void*)ir_frame.get_data(), Mat::AUTO_STEP);
// Apply Histogram Equalization
equalizeHist( ir, ir );
applyColorMap(ir, ir, COLORMAP_JET);
// Display the image in GUI
namedWindow("Display Image", WINDOW_AUTOSIZE );
imshow("Display Image", ir);
waitKey(0);
return 0;
}
Compile and run the program from the terminal, with the following command:
g++ -std=c++11 IR_sample.cpp -lrealsense2 -lopencv_core -lopencv_imgproc -lopencv_highgui -o ir && ./ir
Result :