D435i
The Intel® RealSense™ D435i is a depth camera which includes a Bosch BMI055 6-axis inertial sensor in addition to the depth camera which measures linear accelerations and angular velocities. Each IMU data packet is timestamped using the depth sensor hardware clock to allow temporal synchronization between gyro, accel and depth frames.
Sensor origin and coordinate system
The IMU sensor location and orientation relative to the depth sensors are conveniently embedded into the sensor’s extrinsic data. In order to align and them with SDK-wide established orientation convention using the depth sensor as coordinate system origin, each IMU sample is multiplied internally by the extrinsic matrix.
The resulting orientation angles and acceleration vectors share the coordinate system with the depth sensor.
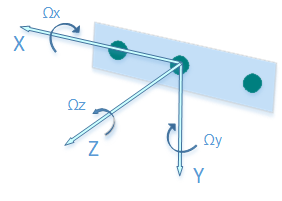
The positive x-axis points to the right.
The positive y-axis points down.
The positive z-axis points forward
The coordinate system is also compatible with the OpenCV pinhole camera model
Note: The accelerometer is an intertial sensor and it measures inertial force. So when the camera is idle, the accelerometer doesn’t measure G-force, but rather the force that resists to G. The resisting force aims up to the ceiling, and according to the coordinate System the positive Y-axis looks “down” and therefore the actual reading (the white line) is -9.8
IMU calibration
The D435i IMU sensor does not include internal calibration, which may manifest itself with non-zero angular velocities produced at idle mode and the gravity (accel) force measured being not equal to 9.80665.
A complementary calibration tool has been developed and published as part of the SDK.
Running the calibration routine will calculate IMU intrinsics and store them on device’s NVRAM for later use in SDK.
The depth<->IMU sensor extrinsic (rigid body transformation) is precalculated based on mechanical drawings and cannot be modified.
When initialized, the SDK will query the device for the existance of the IMU calibration data, and if present - apply it to the raw IMU samples produced by the device.
Integration with the SDK
The following librealsense tools and demos are IMU ready:
rs-capture- 2D Visualizationrs-enumerate-devices- list the IMU and tracking profiles (FPS rates and formats).rs-data-collect- Store and serialize IMU in Excel-friendly csv format. The tool uses low-level sensor API to minimize software-imposed latencies. Useful for performance profiling.realsense-viewer- Provides 2D visualization of IMU data.
The IMU and data streams are fully compatible with SDK’s embedded recorder utility.
API
The IMU is treated by the SDK like any other supported sensor. Therefore the sensor access and invocation API calls are similar to those of the depth/rgb sensors of the D400:
rs2::pipeline pipe;
rs2::config cfg;
cfg.enable_stream(RS2_STREAM_GYRO);
cfg.enable_stream(RS2_STREAM_ACCEL);
pipe.start(cfg);
while (app) // Application still alive?
{
rs2::frameset frameset = pipe.wait_for_frames();
// Find and retrieve IMU data
if (rs2::motion_frame accel_frame = frameset.first_or_default(RS2_STREAM_ACCEL))
{
rs2_vector accel_sample = accel_frame.get_motion_data();
//std::cout << "Accel:" << accel_sample.x << ", " << accel_sample.y << ", " << accel_sample.z << std::endl;
//...
}
if (rs2::motion_frame gyro_frame = frameset.first_or_default(RS2_STREAM_GYRO))
{
rs2_vector gyro_sample = gyro_frame.get_motion_data();
//std::cout << "Gyro:" << gyro_sample.x << ", " << gyro_sample.y << ", " << gyro_sample.z << std::endl;
//...
}
}