|
| virtual void | initContactSensor (const ros::NodeHandle &privateNh) |
| |
| virtual void | insertContactSensor (const jsk_recognition_msgs::ContactSensorArray::ConstPtr &msg) |
| |
| virtual void | insertContactSensorCallback (const jsk_recognition_msgs::ContactSensorArray::ConstPtr &msg) |
| |
| virtual void | insertProximityCallback (const sensor_msgs::PointCloud2::ConstPtr &cloud) |
| |
| virtual void | insertScanProximity (const tf::Point &sensorOriginTf, const PCLPointCloud &pc) |
| |
| | OctomapServerContact (const ros::NodeHandle &privateNh=ros::NodeHandle("~")) |
| |
| virtual void | publishAll (const ros::Time &rostime) |
| |
| virtual void | subscribe () |
| |
| virtual void | unsubscribe () |
| |
| virtual | ~OctomapServerContact () |
| |
| bool | clearBBXSrv (BBXSrv::Request &req, BBXSrv::Response &resp) |
| |
| virtual void | insertCloudCallback (const sensor_msgs::PointCloud2::ConstPtr &cloud) |
| |
| virtual bool | octomapBinarySrv (OctomapSrv::Request &req, OctomapSrv::GetOctomap::Response &res) |
| |
| virtual bool | octomapFullSrv (OctomapSrv::Request &req, OctomapSrv::GetOctomap::Response &res) |
| |
| | OctomapServer (const ros::NodeHandle private_nh_=ros::NodeHandle("~"), const ros::NodeHandle &nh_=ros::NodeHandle()) |
| |
| virtual bool | openFile (const std::string &filename) |
| |
| bool | resetSrv (std_srvs::Empty::Request &req, std_srvs::Empty::Response &resp) |
| |
| virtual | ~OctomapServer () |
| |
| | DiagnosticNodelet (const std::string &name) |
| |
| | ConnectionBasedNodelet () |
| |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| |
| | Nodelet () |
| |
| virtual | ~Nodelet () |
| |
|
| virtual void | onInit () |
| |
| void | adjustMapData (nav_msgs::OccupancyGrid &map, const nav_msgs::MapMetaData &oldMapInfo) const |
| |
| void | filterGroundPlane (const PCLPointCloud &pc, PCLPointCloud &ground, PCLPointCloud &nonground) const |
| |
| virtual void | handleFreeNode (const OcTreeT::iterator &it) |
| |
| virtual void | handleFreeNodeInBBX (const OcTreeT::iterator &it) |
| |
| virtual void | handleNode (const OcTreeT::iterator &it) |
| |
| virtual void | handleNodeInBBX (const OcTreeT::iterator &it) |
| |
| virtual void | handleOccupiedNode (const OcTreeT::iterator &it) |
| |
| virtual void | handleOccupiedNodeInBBX (const OcTreeT::iterator &it) |
| |
| virtual void | handlePostNodeTraversal (const ros::Time &rostime) |
| |
| virtual void | handlePreNodeTraversal (const ros::Time &rostime) |
| |
| virtual void | insertScan (const tf::Point &sensorOrigin, const PCLPointCloud &ground, const PCLPointCloud &nonground) |
| |
| bool | isInUpdateBBX (const OcTreeT::iterator &it) const |
| |
| bool | isSpeckleNode (const octomap::OcTreeKey &key) const |
| |
| bool | mapChanged (const nav_msgs::MapMetaData &oldMapInfo, const nav_msgs::MapMetaData &newMapInfo) |
| |
| unsigned | mapIdx (int i, int j) const |
| |
| unsigned | mapIdx (const octomap::OcTreeKey &key) const |
| |
| void | publishBinaryOctoMap (const ros::Time &rostime=ros::Time::now()) const |
| |
| void | publishFullOctoMap (const ros::Time &rostime=ros::Time::now()) const |
| |
| void | reconfigureCallback (octomap_server::OctomapServerConfig &config, uint32_t level) |
| |
| virtual void | update2DMap (const OcTreeT::iterator &it, bool occupied) |
| |
| virtual void | updateDiagnostic (diagnostic_updater::DiagnosticStatusWrapper &stat) |
| |
| ros::Publisher | advertise (ros::NodeHandle &nh, std::string topic, int queue_size) |
| |
| image_transport::CameraPublisher | advertiseCamera (ros::NodeHandle &nh, image_transport::ImageTransport &it, const std::string &topic, int queue_size) |
| |
| image_transport::CameraPublisher | advertiseCamera (ros::NodeHandle &nh, const std::string &topic, int queue_size) |
| |
| image_transport::Publisher | advertiseImage (ros::NodeHandle &nh, image_transport::ImageTransport &it, const std::string &topic, int queue_size) |
| |
| image_transport::Publisher | advertiseImage (ros::NodeHandle &nh, const std::string &topic, int queue_size) |
| |
| virtual void | cameraConnectionBaseCallback () |
| |
| virtual void | cameraConnectionCallback (const image_transport::SingleSubscriberPublisher &pub) |
| |
| virtual void | cameraInfoConnectionCallback (const ros::SingleSubscriberPublisher &pub) |
| |
| virtual void | connectionCallback (const ros::SingleSubscriberPublisher &pub) |
| |
| virtual void | imageConnectionCallback (const image_transport::SingleSubscriberPublisher &pub) |
| |
| virtual bool | isSubscribed () |
| |
| virtual void | onInitPostProcess () |
| |
| virtual void | warnNeverSubscribedCallback (const ros::WallTimerEvent &event) |
| |
| virtual void | warnOnInitPostProcessCalledCallback (const ros::WallTimerEvent &event) |
| |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| |
| ros::NodeHandle & | getMTNodeHandle () const |
| |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| |
| const V_string & | getMyArgv () const |
| |
| const std::string & | getName () const |
| |
| ros::NodeHandle & | getNodeHandle () const |
| |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| |
| const M_string & | getRemappingArgs () const |
| |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| |
| std::string | getSuffixedName (const std::string &suffix) const |
| |
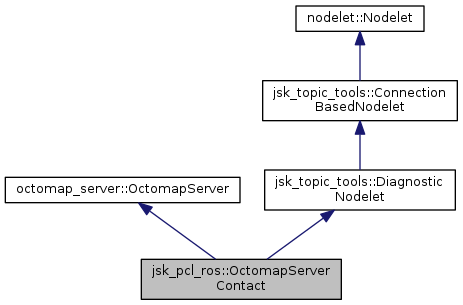
Definition at line 52 of file octomap_server_contact.h.
 Public Member Functions inherited from octomap_server::OctomapServer
Public Member Functions inherited from octomap_server::OctomapServer