#include "youbot_driver/generic/Units.hpp"
Include dependency graph for JointData.hpp:

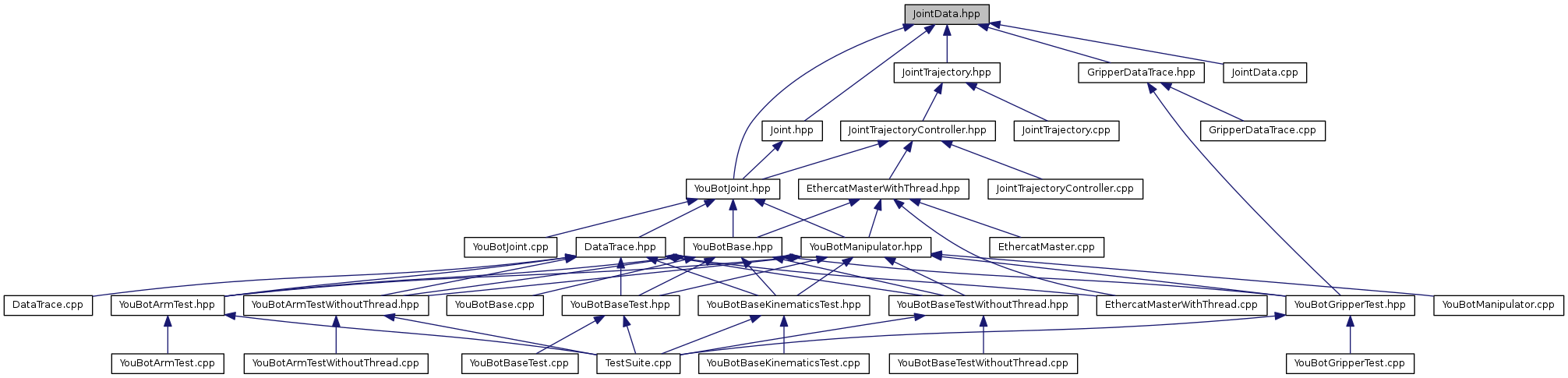
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | youbot::JointAngleSetpoint |
| Set-point angle / position of the joint. More... | |
| class | youbot::JointComputedData |
| abstract data class for computed joint data More... | |
| class | youbot::JointComputedSetpoint |
| abstract data class for computed joint data setpoints More... | |
| class | youbot::JointControllerComputedData |
| abstract data class for data which have been computed by the hardware controller More... | |
| class | youbot::JointCurrentSetpoint |
| Set-point current of the joint. More... | |
| class | youbot::JointData |
| abstract data class for joints More... | |
| class | youbot::JointDataSetpoint |
| abstract data class for commanded joint data More... | |
| class | youbot::JointEncoderSetpoint |
| encoder ticks setpoint of the joint More... | |
| class | youbot::JointPWMSetpoint |
| Pulse-width modulation set-point of the joint. More... | |
| class | youbot::JointRampGeneratorVelocity |
| Sensed velocity of the joint. More... | |
| class | youbot::JointRoundsPerMinuteSetpoint |
| Rounds per minute set-point of the joint. More... | |
| class | youbot::JointSensedAngle |
| Sensed position / angle of the joint. More... | |
| class | youbot::JointSensedCurrent |
| Sensed electric current of the joint. More... | |
| class | youbot::JointSensedData |
| abstract data class for sensed / measured joint data More... | |
| class | youbot::JointSensedEncoderTicks |
| Sensed encoder ticks of the joint. More... | |
| class | youbot::JointSensedPWM |
| actual pwm value of the joint More... | |
| class | youbot::JointSensedRoundsPerMinute |
| Sensed rounds per minute (rpm) of the joint. More... | |
| class | youbot::JointSensedTorque |
| This torque of the joint is computed from the actual current. More... | |
| class | youbot::JointSensedVelocity |
| Sensed velocity of the joint. More... | |
| class | youbot::JointTorqueSetpoint |
| The torque set-point of the joint will be set by setting the computed current set-point. More... | |
| class | youbot::JointVelocitySetpoint |
| Set-point velocity of the joint. More... | |
Namespaces | |
| youbot | |