This torque of the joint is computed from the actual current. More...
#include <JointData.hpp>
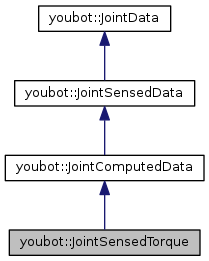
Inheritance diagram for youbot::JointSensedTorque:
Public Member Functions | |
| JointSensedTorque () | |
| JointSensedTorque (const quantity< si::torque > &value) | |
Public Attributes | |
| quantity< si::torque > | torque |
Detailed Description
This torque of the joint is computed from the actual current.
Definition at line 148 of file JointData.hpp.
Constructor & Destructor Documentation
| youbot::JointSensedTorque::JointSensedTorque | ( | ) |
Definition at line 127 of file JointData.cpp.
| youbot::JointSensedTorque::JointSensedTorque | ( | const quantity< si::torque > & | value | ) |
Definition at line 133 of file JointData.cpp.
Member Data Documentation
| quantity<si::torque> youbot::JointSensedTorque::torque |
Definition at line 150 of file JointData.hpp.
The documentation for this class was generated from the following files: