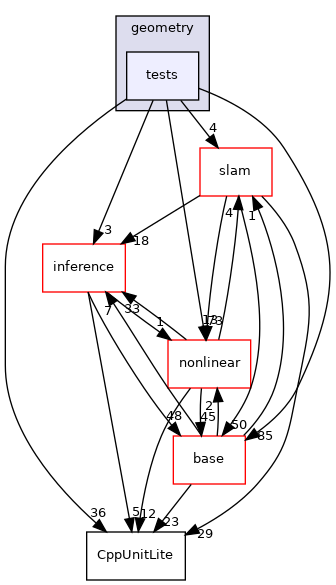
Directory dependency graph for tests:
Files | |
| file | testBearingRange.cpp [code] |
| Unit tests for BearingRange Class. | |
| file | testCal3_S2.cpp [code] |
| Unit tests for basic Cal3_S2 calibration model. | |
| file | testCal3_S2Stereo.cpp [code] |
| Unit tests for stereo-rig calibration model. | |
| file | testCal3Bundler.cpp [code] |
| Unit tests for Bundler calibration model. | |
| file | testCal3DFisheye.cpp [code] |
| file | testCal3DS2.cpp [code] |
| Unit tests for Cal3DS2 calibration model. | |
| file | testCal3f.cpp [code] |
| file | testCal3Unified.cpp [code] |
| Unit tests for Cal3Unified calibration model. | |
| file | testCalibratedCamera.cpp [code] |
| test CalibratedCamera class | |
| file | testCameraSet.cpp [code] |
| Unit tests for testCameraSet Class. | |
| file | testCyclic.cpp [code] |
| Unit tests for cyclic group. | |
| file | testEssentialMatrix.cpp [code] |
| file | testEvent.cpp [code] |
| Unit tests for space time "Event". | |
| file | testFundamentalMatrix.cpp [code] |
| file | testGal3.cpp [code] |
| Unit tests for Gal3 class. | |
| file | testLine3.cpp [code] |
| file | testOrientedPlane3.cpp [code] |
| file | testPinholeCamera.cpp [code] |
| test PinholeCamera class | |
| file | testPinholePose.cpp [code] |
| test PinholePose class | |
| file | testPinholeSet.cpp [code] |
| file | testPoint2.cpp [code] |
| Unit tests for Point2 class. | |
| file | testPoint3.cpp [code] |
| Unit tests for Point3 class. | |
| file | testPose2.cpp [code] |
| Unit tests for Pose2 class. | |
| file | testPose3.cpp [code] |
| Unit tests for Pose3 class. | |
| file | testPoseAdjointMap.h [code] |
| Support utilities for using AdjointMap for transforming Pose2 and Pose3 covariance matrices. | |
| file | testQuaternion.cpp [code] |
| Unit tests for Quaternion, as a GTSAM-adapted Lie Group. | |
| file | testRot2.cpp [code] |
| Unit tests for Rot2 class. | |
| file | testRot3.cpp [code] |
| Unit tests for Rot3 class - common between Matrix and Quaternion. | |
| file | testRot3M.cpp [code] |
| Unit tests for Rot3 class, matrix version. | |
| file | testRot3Q.cpp [code] |
| file | testSerializationGeometry.cpp [code] |
| file | testSimilarity2.cpp [code] |
| Unit tests for Similarity2 class. | |
| file | testSimilarity3.cpp [code] |
| Unit tests for Similarity3 class. | |
| file | testSO3.cpp [code] |
| Unit tests for SO3, as a GTSAM-adapted Lie Group. | |
| file | testSO4.cpp [code] |
| Unit tests for SO4, as a GTSAM-adapted Lie Group. | |
| file | testSOn.cpp [code] |
| Unit tests for dynamic SO(n) classes. | |
| file | testSphericalCamera.cpp [code] |
| file | testStereoCamera.cpp [code] |
| Unit test for StereoCamera single camera. | |
| file | testStereoPoint2.cpp [code] |
| Tests for the StereoPoint2 class. | |
| file | testTriangulation.cpp [code] |
| triangulation utilities | |
| file | testUnit3.cpp [code] |