Support utilities for using AdjointMap for transforming Pose2 and Pose3 covariance matrices. More...
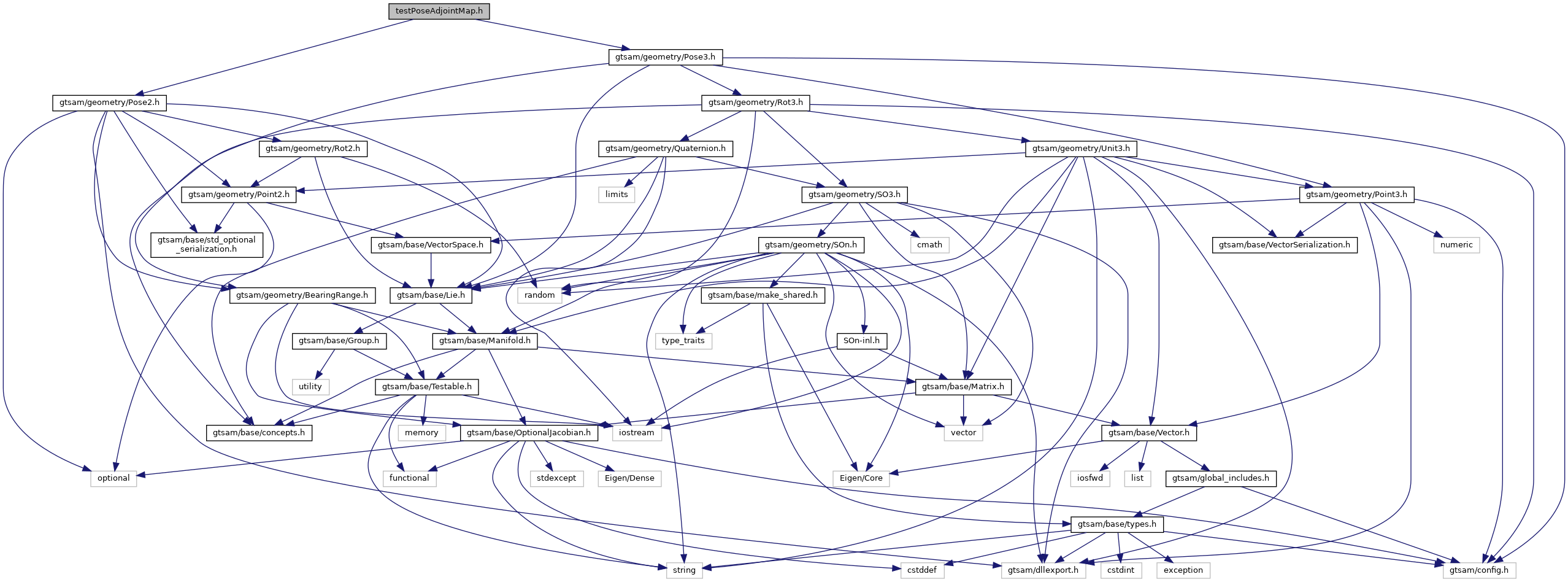
Include dependency graph for testPoseAdjointMap.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| test_pose_adjoint_map | |
Functions | |
| template<class T > | |
| T::Jacobian | test_pose_adjoint_map::FullCovarianceFromSigmas (const typename T::TangentVector &sigmas) |
| template<class T > | |
| T::Jacobian | test_pose_adjoint_map::SingleVariableCovarianceFromSigma (int idx, double sigma) |
| template<class T > | |
| T::Jacobian | test_pose_adjoint_map::TwoVariableCovarianceFromSigmas (int idx0, int idx1, double sigma0, double sigma1) |
Variables | |
| const double | test_pose_adjoint_map::degree = M_PI / 180 |
Detailed Description
Support utilities for using AdjointMap for transforming Pose2 and Pose3 covariance matrices.
Definition in file testPoseAdjointMap.h.