Unit tests for Rot3 class - common between Matrix and Quaternion. More...
#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/base/testLie.h>#include <gtsam/base/Testable.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/base/lieProxies.h>#include <CppUnitLite/TestHarness.h>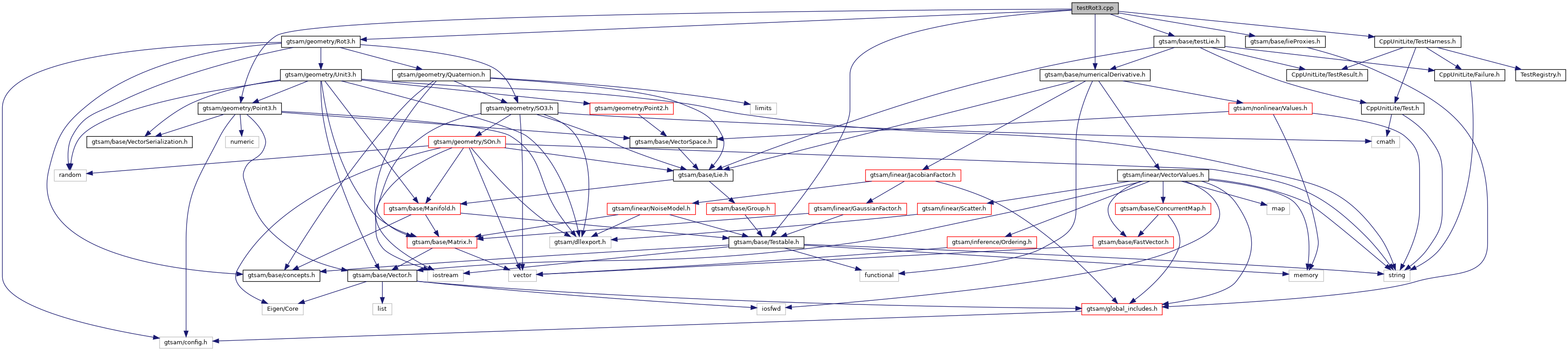
Go to the source code of this file.
Classes | |
| class | AngularVelocity |
Macros | |
| #define | CHECK_AXIS_ANGLE(expectedAxis, expectedAngle, rotation) |
| #define | CHECK_OMEGA(X, Y, Z) |
| #define | CHECK_OMEGA_ZERO(X, Y, Z) |
Functions | |
| AngularVelocity | bracket (const AngularVelocity &X, const AngularVelocity &Y) |
| Matrix | Cayley (const Matrix &A) |
| int | main () |
| static Point3 | P (0.2, 0.7, -2.0) |
| double | pitch_proxy (Rot3 const &R) |
| double | roll_proxy (Rot3 const &R) |
| Vector3 | rpy_proxy (Rot3 const &R) |
| Vector3 | RQ_proxy (Matrix3 const &R) |
| Rot3 | RzRyRx_proxy (double const &a, double const &b, double const &c) |
| Rot3 | RzRyRx_proxy (Vector3 const &xyz) |
| Rot3 | slow_but_correct_Rodrigues (const Vector &w) |
| TEST (Rot3, AxisAngle) | |
| TEST (Rot3, axisAngle) | |
| TEST (Rot3, AxisAngle2) | |
| TEST (Rot3, BCH) | |
| TEST (Rot3, between) | |
| TEST (Rot3, BruteForceExpmap) | |
| TEST (Rot3, Cayley) | |
| TEST (Rot3, chart) | |
| TEST (Rot3, ChartDerivatives) | |
| TEST (Rot3, ClosestTo) | |
| TEST (Rot3, compose) | |
| TEST (Rot3, Concept) | |
| TEST (Rot3, constructor) | |
| TEST (Rot3, constructor2) | |
| TEST (Rot3, constructor3) | |
| TEST (Rot3, ConvertQuaternion) | |
| TEST (Rot3, determinant) | |
| TEST (Rot3, equals) | |
| TEST (Rot3, expmap_logmap) | |
| TEST (Rot3, ExpmapChainRule) | |
| TEST (Rot3, expmapChainRule) | |
| TEST (Rot3, expmapStability) | |
| TEST (Rot3, HatAndVee) | |
| TEST (Rot3, Invariants) | |
| TEST (Rot3, inverse) | |
| TEST (Rot3, LieGroupDerivatives) | |
| TEST (Rot3, log) | |
| TEST (Rot3, logmapStability) | |
| TEST (Rot3, manifold_expmap) | |
| TEST (Rot3, pitch_derivative) | |
| TEST (Rot3, quaternion) | |
| TEST (Rot3, retract) | |
| TEST (Rot3, retract_localCoordinates) | |
| TEST (Rot3, retract_localCoordinates2) | |
| TEST (Rot3, Rodrigues) | |
| TEST (Rot3, Rodrigues2) | |
| TEST (Rot3, Rodrigues3) | |
| TEST (Rot3, Rodrigues4) | |
| TEST (Rot3, roll_derivative) | |
| TEST (Rot3, rotate_derivatives) | |
| TEST (Rot3, rpy_derivative) | |
| TEST (Rot3, RQ) | |
| TEST (Rot3, RQ_derivative) | |
| TEST (Rot3, RzRyRx_scalars_derivative) | |
| TEST (Rot3, RzRyRx_vector_derivative) | |
| TEST (Rot3, slerp) | |
| TEST (Rot3, stream) | |
| TEST (Rot3, transpose) | |
| TEST (Rot3, unrotate) | |
| TEST (Rot3, xyz) | |
| TEST (Rot3, xyz_derivative) | |
| TEST (Rot3, yaw_derivative) | |
| TEST (Rot3, yaw_pitch_roll) | |
| TEST (Rot3, Ypr_derivative) | |
| TEST (Rot3, ypr_derivative) | |
| Vector3 | xyz_proxy (Rot3 const &R) |
| double | yaw_proxy (Rot3 const &R) |
| Rot3 | Ypr_proxy (double const &y, double const &p, double const &r) |
| Vector3 | ypr_proxy (Rot3 const &R) |
Variables | |
| static double | epsilon = 0.001 |
| static double | error = 1e-9 |
| static Rot3 | R = Rot3::Rodrigues(0.1, 0.4, 0.2) |
Detailed Description
Unit tests for Rot3 class - common between Matrix and Quaternion.
Unit tests for Rot3Q class.
Unit tests for Rot3 class, Quaternion specific.
Definition in file testRot3.cpp.
Macro Definition Documentation
◆ CHECK_AXIS_ANGLE
| #define CHECK_AXIS_ANGLE | ( | expectedAxis, | |
| expectedAngle, | |||
| rotation | |||
| ) |
◆ CHECK_OMEGA
◆ CHECK_OMEGA_ZERO
Function Documentation
◆ bracket()
| AngularVelocity bracket | ( | const AngularVelocity & | X, |
| const AngularVelocity & | Y | ||
| ) |
Definition at line 365 of file testRot3.cpp.
◆ Cayley()
Definition at line 648 of file testRot3.cpp.
◆ main()
| int main | ( | ) |
Definition at line 1028 of file testRot3.cpp.
◆ P()
|
static |
◆ pitch_proxy()
| double pitch_proxy | ( | Rot3 const & | R | ) |
Definition at line 942 of file testRot3.cpp.
◆ roll_proxy()
| double roll_proxy | ( | Rot3 const & | R | ) |
Definition at line 929 of file testRot3.cpp.
◆ rpy_proxy()
Definition at line 916 of file testRot3.cpp.
◆ RQ_proxy()
| Vector3 RQ_proxy | ( | Matrix3 const & | R | ) |
Definition at line 852 of file testRot3.cpp.
◆ RzRyRx_proxy() [1/2]
| Rot3 RzRyRx_proxy | ( | double const & | a, |
| double const & | b, | ||
| double const & | c | ||
| ) |
Definition at line 801 of file testRot3.cpp.
◆ RzRyRx_proxy() [2/2]
Definition at line 820 of file testRot3.cpp.
◆ slow_but_correct_Rodrigues()
Definition at line 97 of file testRot3.cpp.
◆ TEST() [1/55]
| TEST | ( | Rot3 | , |
| AxisAngle | |||
| ) |
Definition at line 106 of file testRot3.cpp.
◆ TEST() [2/55]
| TEST | ( | Rot3 | , |
| axisAngle | |||
| ) |
◆ TEST() [3/55]
| TEST | ( | Rot3 | , |
| AxisAngle2 | |||
| ) |
Definition at line 124 of file testRot3.cpp.
◆ TEST() [4/55]
| TEST | ( | Rot3 | , |
| BCH | |||
| ) |
Definition at line 370 of file testRot3.cpp.
◆ TEST() [5/55]
| TEST | ( | Rot3 | , |
| between | |||
| ) |
Definition at line 448 of file testRot3.cpp.
◆ TEST() [6/55]
| TEST | ( | Rot3 | , |
| BruteForceExpmap | |||
| ) |
Definition at line 350 of file testRot3.cpp.
◆ TEST() [7/55]
Definition at line 654 of file testRot3.cpp.
◆ TEST() [8/55]
| TEST | ( | Rot3 | , |
| chart | |||
| ) |
Definition at line 47 of file testRot3.cpp.
◆ TEST() [9/55]
| TEST | ( | Rot3 | , |
| ChartDerivatives | |||
| ) |
Definition at line 715 of file testRot3.cpp.
◆ TEST() [10/55]
| TEST | ( | Rot3 | , |
| ClosestTo | |||
| ) |
Definition at line 726 of file testRot3.cpp.
◆ TEST() [11/55]
| TEST | ( | Rot3 | , |
| compose | |||
| ) |
Definition at line 412 of file testRot3.cpp.
◆ TEST() [12/55]
| TEST | ( | Rot3 | , |
| Concept | |||
| ) |
Definition at line 40 of file testRot3.cpp.
◆ TEST() [13/55]
| TEST | ( | Rot3 | , |
| constructor | |||
| ) |
Definition at line 54 of file testRot3.cpp.
◆ TEST() [14/55]
| TEST | ( | Rot3 | , |
| constructor2 | |||
| ) |
Definition at line 63 of file testRot3.cpp.
◆ TEST() [15/55]
| TEST | ( | Rot3 | , |
| constructor3 | |||
| ) |
Definition at line 72 of file testRot3.cpp.
◆ TEST() [16/55]
| TEST | ( | Rot3 | , |
| ConvertQuaternion | |||
| ) |
Definition at line 629 of file testRot3.cpp.
◆ TEST() [17/55]
| TEST | ( | Rot3 | , |
| determinant | |||
| ) |
Definition at line 968 of file testRot3.cpp.
◆ TEST() [18/55]
Definition at line 88 of file testRot3.cpp.
◆ TEST() [19/55]
| TEST | ( | Rot3 | , |
| expmap_logmap | |||
| ) |
Definition at line 280 of file testRot3.cpp.
◆ TEST() [20/55]
| TEST | ( | Rot3 | , |
| ExpmapChainRule | |||
| ) |
Definition at line 988 of file testRot3.cpp.
◆ TEST() [21/55]
| TEST | ( | Rot3 | , |
| expmapChainRule | |||
| ) |
Definition at line 1007 of file testRot3.cpp.
◆ TEST() [22/55]
| TEST | ( | Rot3 | , |
| expmapStability | |||
| ) |
Definition at line 562 of file testRot3.cpp.
◆ TEST() [23/55]
| TEST | ( | Rot3 | , |
| HatAndVee | |||
| ) |
Definition at line 328 of file testRot3.cpp.
◆ TEST() [24/55]
| TEST | ( | Rot3 | , |
| Invariants | |||
| ) |
Definition at line 691 of file testRot3.cpp.
◆ TEST() [25/55]
Definition at line 432 of file testRot3.cpp.
◆ TEST() [26/55]
| TEST | ( | Rot3 | , |
| LieGroupDerivatives | |||
| ) |
Definition at line 706 of file testRot3.cpp.
◆ TEST() [27/55]
Definition at line 195 of file testRot3.cpp.
◆ TEST() [28/55]
| TEST | ( | Rot3 | , |
| logmapStability | |||
| ) |
Definition at line 578 of file testRot3.cpp.
◆ TEST() [29/55]
| TEST | ( | Rot3 | , |
| manifold_expmap | |||
| ) |
Definition at line 298 of file testRot3.cpp.
◆ TEST() [30/55]
| TEST | ( | Rot3 | , |
| pitch_derivative | |||
| ) |
Definition at line 944 of file testRot3.cpp.
◆ TEST() [31/55]
| TEST | ( | Rot3 | , |
| quaternion | |||
| ) |
Definition at line 591 of file testRot3.cpp.
◆ TEST() [32/55]
| TEST | ( | Rot3 | , |
| retract | |||
| ) |
Definition at line 183 of file testRot3.cpp.
◆ TEST() [33/55]
| TEST | ( | Rot3 | , |
| retract_localCoordinates | |||
| ) |
Definition at line 273 of file testRot3.cpp.
◆ TEST() [34/55]
| TEST | ( | Rot3 | , |
| retract_localCoordinates2 | |||
| ) |
Definition at line 288 of file testRot3.cpp.
◆ TEST() [35/55]
| TEST | ( | Rot3 | , |
| Rodrigues | |||
| ) |
Definition at line 137 of file testRot3.cpp.
◆ TEST() [36/55]
| TEST | ( | Rot3 | , |
| Rodrigues2 | |||
| ) |
Definition at line 146 of file testRot3.cpp.
◆ TEST() [37/55]
| TEST | ( | Rot3 | , |
| Rodrigues3 | |||
| ) |
Definition at line 160 of file testRot3.cpp.
◆ TEST() [38/55]
| TEST | ( | Rot3 | , |
| Rodrigues4 | |||
| ) |
Definition at line 169 of file testRot3.cpp.
◆ TEST() [39/55]
| TEST | ( | Rot3 | , |
| roll_derivative | |||
| ) |
Definition at line 931 of file testRot3.cpp.
◆ TEST() [40/55]
| TEST | ( | Rot3 | , |
| rotate_derivatives | |||
| ) |
Definition at line 383 of file testRot3.cpp.
◆ TEST() [41/55]
| TEST | ( | Rot3 | , |
| rpy_derivative | |||
| ) |
Definition at line 918 of file testRot3.cpp.
◆ TEST() [42/55]
Definition at line 532 of file testRot3.cpp.
◆ TEST() [43/55]
| TEST | ( | Rot3 | , |
| RQ_derivative | |||
| ) |
Definition at line 857 of file testRot3.cpp.
◆ TEST() [44/55]
| TEST | ( | Rot3 | , |
| RzRyRx_scalars_derivative | |||
| ) |
Definition at line 805 of file testRot3.cpp.
◆ TEST() [45/55]
| TEST | ( | Rot3 | , |
| RzRyRx_vector_derivative | |||
| ) |
Definition at line 822 of file testRot3.cpp.
◆ TEST() [46/55]
| TEST | ( | Rot3 | , |
| slerp | |||
| ) |
Definition at line 672 of file testRot3.cpp.
◆ TEST() [47/55]
| TEST | ( | Rot3 | , |
| stream | |||
| ) |
Definition at line 662 of file testRot3.cpp.
◆ TEST() [48/55]
| TEST | ( | Rot3 | , |
| transpose | |||
| ) |
Definition at line 80 of file testRot3.cpp.
◆ TEST() [49/55]
| TEST | ( | Rot3 | , |
| unrotate | |||
| ) |
Definition at line 397 of file testRot3.cpp.
◆ TEST() [50/55]
| TEST | ( | Rot3 | , |
| xyz | |||
| ) |
Definition at line 480 of file testRot3.cpp.
◆ TEST() [51/55]
| TEST | ( | Rot3 | , |
| xyz_derivative | |||
| ) |
Definition at line 892 of file testRot3.cpp.
◆ TEST() [52/55]
| TEST | ( | Rot3 | , |
| yaw_derivative | |||
| ) |
Definition at line 957 of file testRot3.cpp.
◆ TEST() [53/55]
| TEST | ( | Rot3 | , |
| yaw_pitch_roll | |||
| ) |
Definition at line 511 of file testRot3.cpp.
◆ TEST() [54/55]
| TEST | ( | Rot3 | , |
| Ypr_derivative | |||
| ) |
Definition at line 837 of file testRot3.cpp.
◆ TEST() [55/55]
| TEST | ( | Rot3 | , |
| ypr_derivative | |||
| ) |
Definition at line 905 of file testRot3.cpp.
◆ xyz_proxy()
Definition at line 890 of file testRot3.cpp.
◆ yaw_proxy()
| double yaw_proxy | ( | Rot3 const & | R | ) |
Definition at line 955 of file testRot3.cpp.
◆ Ypr_proxy()
| Rot3 Ypr_proxy | ( | double const & | y, |
| double const & | p, | ||
| double const & | r | ||
| ) |
Definition at line 833 of file testRot3.cpp.
◆ ypr_proxy()
Definition at line 903 of file testRot3.cpp.
Variable Documentation
◆ epsilon
|
static |
Definition at line 37 of file testRot3.cpp.
◆ error
|
static |
Definition at line 37 of file testRot3.cpp.
◆ R
|
static |
Definition at line 35 of file testRot3.cpp.