#include <SensorCaptureThread.h>
Public Member Functions | |
| Camera * | camera () |
| void | disableBilateralFiltering () |
| void | disableFeatureDetection () |
| void | disableIMUFiltering () |
| void | enableBilateralFiltering (float sigmaS, float sigmaR) |
| void | enableFeatureDetection (const ParametersMap ¶meters=ParametersMap()) |
| void | enableIMUFiltering (int filteringStrategy=1, const ParametersMap ¶meters=ParametersMap(), bool baseFrameConversion=false) |
| bool | isCapturing () const |
| bool | isPaused () const |
| Lidar * | lidar () |
| bool | odomProvided () const |
| SensorCapture * | odomSensor () |
| void | postUpdate (SensorData *data, SensorCaptureInfo *info=0) const |
| SensorCaptureThread (Camera *camera, const ParametersMap ¶meters=ParametersMap()) | |
| SensorCaptureThread (Camera *camera, SensorCapture *odomSensor, const Transform &extrinsics, double poseTimeOffset=0.0, float poseScaleFactor=1.0f, double poseWaitTime=0.1, const ParametersMap ¶meters=ParametersMap()) | |
| SensorCaptureThread (Lidar *lidar, Camera *camera, const ParametersMap ¶meters=ParametersMap()) | |
| SensorCaptureThread (Lidar *lidar, Camera *camera, SensorCapture *odomSensor, const Transform &extrinsics, double poseTimeOffset=0.0, float poseScaleFactor=1.0f, double poseWaitTime=0.1, const ParametersMap ¶meters=ParametersMap()) | |
| SensorCaptureThread (Lidar *lidar, const ParametersMap ¶meters=ParametersMap()) | |
| SensorCaptureThread (Lidar *lidar, SensorCapture *odomSensor, double poseTimeOffset=0.0, float poseScaleFactor=1.0f, double poseWaitTime=0.1, const ParametersMap ¶meters=ParametersMap()) | |
| void | setColorOnly (bool colorOnly) |
| void | setDistortionModel (const std::string &path) |
| void | setFrameRate (float frameRate) |
| void | setHistogramMethod (int histogramMethod) |
| void | setImageDecimation (int decimation) |
| RTABMAP_DEPRECATED void | setImageRate (float frameRate) |
| void | setMirroringEnabled (bool enabled) |
| void | setOdomAsGroundTruth (bool enabled) |
| RTABMAP_DEPRECATED void | setScanParameters (bool fromDepth, int downsampleStep, float rangeMin, float rangeMax, float voxelSize, int normalsK, float normalsRadius, bool forceGroundNormalsUp, bool deskewing) |
| void | setScanParameters (bool fromDepth, int downsampleStep=1, float rangeMin=0.0f, float rangeMax=0.0f, float voxelSize=0.0f, int normalsK=0, float normalsRadius=0.0f, float groundNormalsUp=0.0f, bool deskewing=false) |
| void | setStereoExposureCompensation (bool enabled) |
| void | setStereoToDepth (bool enabled) |
| virtual | ~SensorCaptureThread () |
 Public Member Functions inherited from UThread Public Member Functions inherited from UThread | |
| Handle | getThreadHandle () const |
| unsigned long | getThreadId () const |
| bool | isCreating () const |
| bool | isIdle () const |
| bool | isKilled () const |
| bool | isRunning () const |
| void | join (bool killFirst=false) |
| void | kill () |
| void | setAffinity (int cpu=0) |
| void | setPriority (Priority priority) |
| void | start () |
| UThread (Priority priority=kPNormal) | |
| virtual | ~UThread () |
| Public Member Functions inherited from UThreadC< void > | |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| virtual | ~UThreadC () |
| virtual | ~UThreadC () |
| Public Member Functions inherited from UEventsSender | |
| UEventsSender () | |
| virtual | ~UEventsSender () |
Private Member Functions | |
| virtual void | mainLoop () |
| virtual void | mainLoopBegin () |
| virtual void | mainLoopKill () |
Additional Inherited Members | |
| Public Types inherited from UThread | |
| enum | Priority { kPLow, kPBelowNormal, kPNormal, kPAboveNormal, kPRealTime } |
| Public Types inherited from UThreadC< void > | |
| typedef THREAD_HANDLE | Handle |
| typedef THREAD_HANDLE | Handle |
| typedef void(* | Handler) () |
| typedef void(* | Handler) () |
| Static Public Member Functions inherited from UThread | |
| static unsigned long | currentThreadId () |
| Static Public Member Functions inherited from UThreadC< void > | |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| static int | Detach (const Handle &H) |
| static int | Detach (Handle H) |
| static int | Join (const Handle &H) |
| static int | Join (Handle H) |
| static int | Kill (const Handle &H) |
| static int | Kill (Handle H) |
| Protected Member Functions inherited from UThreadC< void > | |
| UThreadC () | |
| UThreadC () | |
| Protected Member Functions inherited from UEventsSender | |
| void | post (UEvent *event, bool async=true) const |
| Static Protected Member Functions inherited from UThreadC< void > | |
| static void | Exit () |
| static void | Exit () |
| static Handle | Self () |
| static int | Self () |
| static void | TestCancel () |
| static void | TestCancel () |
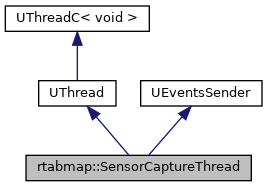
Detailed Description
Class CameraThread
Definition at line 58 of file SensorCaptureThread.h.
Constructor & Destructor Documentation
◆ SensorCaptureThread() [1/6]
| rtabmap::SensorCaptureThread::SensorCaptureThread | ( | Camera * | camera, |
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
Definition at line 54 of file SensorCaptureThread.cpp.
◆ SensorCaptureThread() [2/6]
| rtabmap::SensorCaptureThread::SensorCaptureThread | ( | Camera * | camera, |
| SensorCapture * | odomSensor, | ||
| const Transform & | extrinsics, | ||
| double | poseTimeOffset = 0.0, |
||
| float | poseScaleFactor = 1.0f, |
||
| double | poseWaitTime = 0.1, |
||
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
- Parameters
-
camera the camera to take images from odomSensor an odometry sensor to get a pose (can be again the camera) odomAsGt set odometry sensor pose as ground truth instead of odometry extrinsics the static transform between odometry sensor's left lens frame to camera's left lens frame (without optical rotation)
Definition at line 63 of file SensorCaptureThread.cpp.
◆ SensorCaptureThread() [3/6]
| rtabmap::SensorCaptureThread::SensorCaptureThread | ( | Lidar * | lidar, |
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
- Parameters
-
lidar the lidar to take scans from
Definition at line 76 of file SensorCaptureThread.cpp.
◆ SensorCaptureThread() [4/6]
| rtabmap::SensorCaptureThread::SensorCaptureThread | ( | Lidar * | lidar, |
| Camera * | camera, | ||
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
- Parameters
-
lidar the lidar to take scans from camera the camera to take images from. If the camera is providing a pose, it can be used for deskewing
Definition at line 84 of file SensorCaptureThread.cpp.
◆ SensorCaptureThread() [5/6]
| rtabmap::SensorCaptureThread::SensorCaptureThread | ( | Lidar * | lidar, |
| SensorCapture * | odomSensor, | ||
| double | poseTimeOffset = 0.0, |
||
| float | poseScaleFactor = 1.0f, |
||
| double | poseWaitTime = 0.1, |
||
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
- Parameters
-
lidar the lidar to take scans from odomSensor an odometry sensor to get a pose and used for deskewing (can be again the lidar)
Definition at line 93 of file SensorCaptureThread.cpp.
◆ SensorCaptureThread() [6/6]
| rtabmap::SensorCaptureThread::SensorCaptureThread | ( | Lidar * | lidar, |
| Camera * | camera, | ||
| SensorCapture * | odomSensor, | ||
| const Transform & | extrinsics, | ||
| double | poseTimeOffset = 0.0, |
||
| float | poseScaleFactor = 1.0f, |
||
| double | poseWaitTime = 0.1, |
||
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
- Parameters
-
lidar the lidar to take scans from camera the camera to take images from odomSensor an odometry sensor to get a pose and used for deskewing (can be again the camera or lidar) extrinsics the static transform between odometry frame to camera frame (without optical rotation)
Definition at line 105 of file SensorCaptureThread.cpp.
◆ ~SensorCaptureThread()
|
virtual |
Definition at line 169 of file SensorCaptureThread.cpp.
Member Function Documentation
◆ camera()
|
inline |
Definition at line 169 of file SensorCaptureThread.h.
◆ disableBilateralFiltering()
|
inline |
Definition at line 134 of file SensorCaptureThread.h.
◆ disableFeatureDetection()
| void rtabmap::SensorCaptureThread::disableFeatureDetection | ( | ) |
Definition at line 256 of file SensorCaptureThread.cpp.
◆ disableIMUFiltering()
| void rtabmap::SensorCaptureThread::disableIMUFiltering | ( | ) |
Definition at line 231 of file SensorCaptureThread.cpp.
◆ enableBilateralFiltering()
Definition at line 216 of file SensorCaptureThread.cpp.
◆ enableFeatureDetection()
| void rtabmap::SensorCaptureThread::enableFeatureDetection | ( | const ParametersMap & | parameters = ParametersMap() | ) |
Definition at line 237 of file SensorCaptureThread.cpp.
◆ enableIMUFiltering()
| void rtabmap::SensorCaptureThread::enableIMUFiltering | ( | int | filteringStrategy = 1, |
| const ParametersMap & | parameters = ParametersMap(), |
||
| bool | baseFrameConversion = false |
||
| ) |
Definition at line 224 of file SensorCaptureThread.cpp.
◆ isCapturing()
|
inline |
Definition at line 166 of file SensorCaptureThread.h.
◆ isPaused()
|
inline |
Definition at line 165 of file SensorCaptureThread.h.
◆ lidar()
|
inline |
Definition at line 171 of file SensorCaptureThread.h.
◆ mainLoop()
|
privatevirtual |
Pure virtual method mainLoop(). The inner loop of the thread. This method is called repetitively until the thread is killed. Note that if kill() is called in mainLoopBegin(), mainLoop() is not called, terminating immediately the thread.
- See also
- mainLoop()
- kill()
Implements UThread.
Definition at line 325 of file SensorCaptureThread.cpp.
◆ mainLoopBegin()
|
privatevirtual |
Virtual method mainLoopBegin(). User can implement this function to add a behavior before the main loop is started. It is called once (before entering mainLoop()).
Reimplemented from UThread.
Definition at line 307 of file SensorCaptureThread.cpp.
◆ mainLoopKill()
|
privatevirtual |
Virtual method mainLoopKill(). User can implement this function to add a behavior before the thread is killed. When this function is called, the state of the thread is set to kSKilled. It is useful to wake up a sleeping thread to finish his loop and to avoid a deadlock.
Reimplemented from UThread.
Definition at line 548 of file SensorCaptureThread.cpp.
◆ odomProvided()
| bool rtabmap::SensorCaptureThread::odomProvided | ( | ) | const |
Definition at line 298 of file SensorCaptureThread.cpp.
◆ odomSensor()
|
inline |
Definition at line 170 of file SensorCaptureThread.h.
◆ postUpdate()
| void rtabmap::SensorCaptureThread::postUpdate | ( | SensorData * | data, |
| SensorCaptureInfo * | info = 0 |
||
| ) | const |
Definition at line 573 of file SensorCaptureThread.cpp.
◆ setColorOnly()
|
inline |
Definition at line 125 of file SensorCaptureThread.h.
◆ setDistortionModel()
| void rtabmap::SensorCaptureThread::setDistortionModel | ( | const std::string & | path | ) |
Definition at line 196 of file SensorCaptureThread.cpp.
◆ setFrameRate()
| void rtabmap::SensorCaptureThread::setFrameRate | ( | float | frameRate | ) |
Definition at line 184 of file SensorCaptureThread.cpp.
◆ setHistogramMethod()
|
inline |
Definition at line 127 of file SensorCaptureThread.h.
◆ setImageDecimation()
|
inline |
Definition at line 126 of file SensorCaptureThread.h.
◆ setImageRate()
|
inline |
Definition at line 130 of file SensorCaptureThread.h.
◆ setMirroringEnabled()
|
inline |
Definition at line 123 of file SensorCaptureThread.h.
◆ setOdomAsGroundTruth()
|
inline |
Definition at line 132 of file SensorCaptureThread.h.
◆ setScanParameters() [1/2]
| void rtabmap::SensorCaptureThread::setScanParameters | ( | bool | fromDepth, |
| int | downsampleStep, | ||
| float | rangeMin, | ||
| float | rangeMax, | ||
| float | voxelSize, | ||
| int | normalsK, | ||
| float | normalsRadius, | ||
| bool | forceGroundNormalsUp, | ||
| bool | deskewing | ||
| ) |
Definition at line 262 of file SensorCaptureThread.cpp.
◆ setScanParameters() [2/2]
| void rtabmap::SensorCaptureThread::setScanParameters | ( | bool | fromDepth, |
| int | downsampleStep = 1, |
||
| float | rangeMin = 0.0f, |
||
| float | rangeMax = 0.0f, |
||
| float | voxelSize = 0.0f, |
||
| int | normalsK = 0, |
||
| float | normalsRadius = 0.0f, |
||
| float | groundNormalsUp = 0.0f, |
||
| bool | deskewing = false |
||
| ) |
Definition at line 276 of file SensorCaptureThread.cpp.
◆ setStereoExposureCompensation()
|
inline |
Definition at line 124 of file SensorCaptureThread.h.
◆ setStereoToDepth()
|
inline |
Definition at line 128 of file SensorCaptureThread.h.
Member Data Documentation
◆ _bilateralFiltering
|
private |
Definition at line 204 of file SensorCaptureThread.h.
◆ _bilateralSigmaR
|
private |
Definition at line 206 of file SensorCaptureThread.h.
◆ _bilateralSigmaS
|
private |
Definition at line 205 of file SensorCaptureThread.h.
◆ _camera
|
private |
Definition at line 179 of file SensorCaptureThread.h.
◆ _colorOnly
|
private |
Definition at line 189 of file SensorCaptureThread.h.
◆ _depthAsMask
|
private |
Definition at line 210 of file SensorCaptureThread.h.
◆ _distortionModel
|
private |
Definition at line 203 of file SensorCaptureThread.h.
◆ _extrinsicsOdomToCamera
|
private |
Definition at line 182 of file SensorCaptureThread.h.
◆ _featureDetector
|
private |
Definition at line 209 of file SensorCaptureThread.h.
◆ _histogramMethod
|
private |
Definition at line 191 of file SensorCaptureThread.h.
◆ _imageDecimation
|
private |
Definition at line 190 of file SensorCaptureThread.h.
◆ _imuBaseFrameConversion
|
private |
Definition at line 208 of file SensorCaptureThread.h.
◆ _imuFilter
|
private |
Definition at line 207 of file SensorCaptureThread.h.
◆ _lidar
|
private |
Definition at line 181 of file SensorCaptureThread.h.
◆ _mirroring
|
private |
Definition at line 187 of file SensorCaptureThread.h.
◆ _odomAsGt
|
private |
Definition at line 183 of file SensorCaptureThread.h.
◆ _odomSensor
|
private |
Definition at line 180 of file SensorCaptureThread.h.
◆ _poseScaleFactor
|
private |
Definition at line 185 of file SensorCaptureThread.h.
◆ _poseTimeOffset
|
private |
Definition at line 184 of file SensorCaptureThread.h.
◆ _poseWaitTime
|
private |
Definition at line 186 of file SensorCaptureThread.h.
◆ _scanDeskewing
|
private |
Definition at line 193 of file SensorCaptureThread.h.
◆ _scanDownsampleStep
|
private |
Definition at line 195 of file SensorCaptureThread.h.
◆ _scanForceGroundNormalsUp
|
private |
Definition at line 201 of file SensorCaptureThread.h.
◆ _scanFromDepth
|
private |
Definition at line 194 of file SensorCaptureThread.h.
◆ _scanNormalsK
|
private |
Definition at line 199 of file SensorCaptureThread.h.
◆ _scanNormalsRadius
|
private |
Definition at line 200 of file SensorCaptureThread.h.
◆ _scanRangeMax
|
private |
Definition at line 197 of file SensorCaptureThread.h.
◆ _scanRangeMin
|
private |
Definition at line 196 of file SensorCaptureThread.h.
◆ _scanVoxelSize
|
private |
Definition at line 198 of file SensorCaptureThread.h.
◆ _stereoDense
|
private |
Definition at line 202 of file SensorCaptureThread.h.
◆ _stereoExposureCompensation
|
private |
Definition at line 188 of file SensorCaptureThread.h.
◆ _stereoToDepth
|
private |
Definition at line 192 of file SensorCaptureThread.h.
The documentation for this class was generated from the following files: