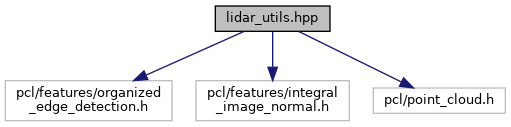
#include <pcl/features/organized_edge_detection.h>#include <pcl/features/integral_image_normal.h>#include <pcl/point_cloud.h>
Include dependency graph for lidar_utils.hpp:
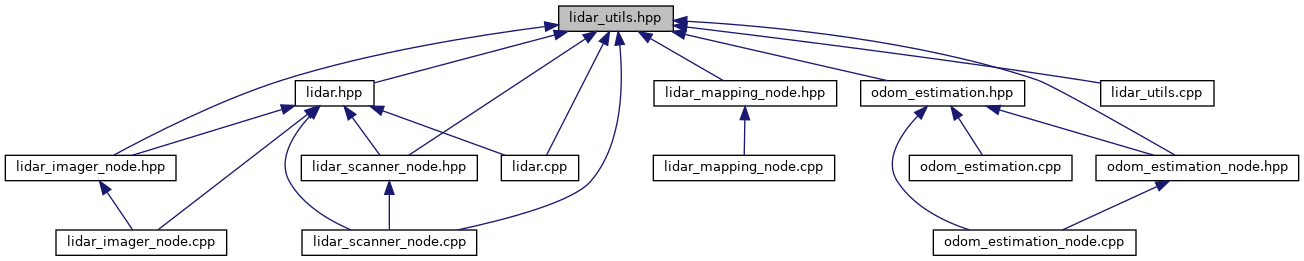
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | floam::lidar::AngularResolution |
| struct | floam::lidar::Distance |
| class | floam::lidar::Double2d |
| struct | floam::lidar::Edge |
| struct | floam::lidar::FOV |
| class | floam::lidar::Imager |
| struct | floam::lidar::Limits |
| class | floam::lidar::PointsInfo |
| class | floam::lidar::Scanner |
| struct | floam::lidar::Settings |
| struct | floam::lidar::Surface |
| struct | floam::lidar::Total |
Namespaces | |
| floam | |
| Major rewrite Author: Evan Flynn. | |
| floam::lidar | |
Enumerations | |
| enum | floam::lidar::Type { floam::lidar::SCANNER_ROTATING = 0, floam::lidar::SCANNER_MEMS, floam::lidar::IMAGER } |