#include "fcl/narrowphase/detail/conservative_advancement_func_matrix.h"#include "fcl/common/unused.h"#include "fcl/narrowphase/collision_object.h"#include "fcl/math/motion/motion_base.h"#include "fcl/geometry/bvh/BVH_model.h"#include "fcl/geometry/shape/box.h"#include "fcl/geometry/shape/capsule.h"#include "fcl/geometry/shape/cone.h"#include "fcl/geometry/shape/convex.h"#include "fcl/geometry/shape/cylinder.h"#include "fcl/geometry/shape/ellipsoid.h"#include "fcl/geometry/shape/halfspace.h"#include "fcl/geometry/shape/plane.h"#include "fcl/geometry/shape/sphere.h"#include "fcl/geometry/shape/triangle_p.h"#include "fcl/narrowphase/detail/traversal/traversal_recurse.h"#include "fcl/narrowphase/detail/traversal/distance/mesh_conservative_advancement_traversal_node.h"#include "fcl/narrowphase/detail/traversal/distance/shape_conservative_advancement_traversal_node.h"#include "fcl/narrowphase/detail/traversal/distance/mesh_shape_conservative_advancement_traversal_node.h"#include "fcl/narrowphase/detail/traversal/distance/shape_mesh_conservative_advancement_traversal_node.h"
Include dependency graph for conservative_advancement_func_matrix-inl.h:

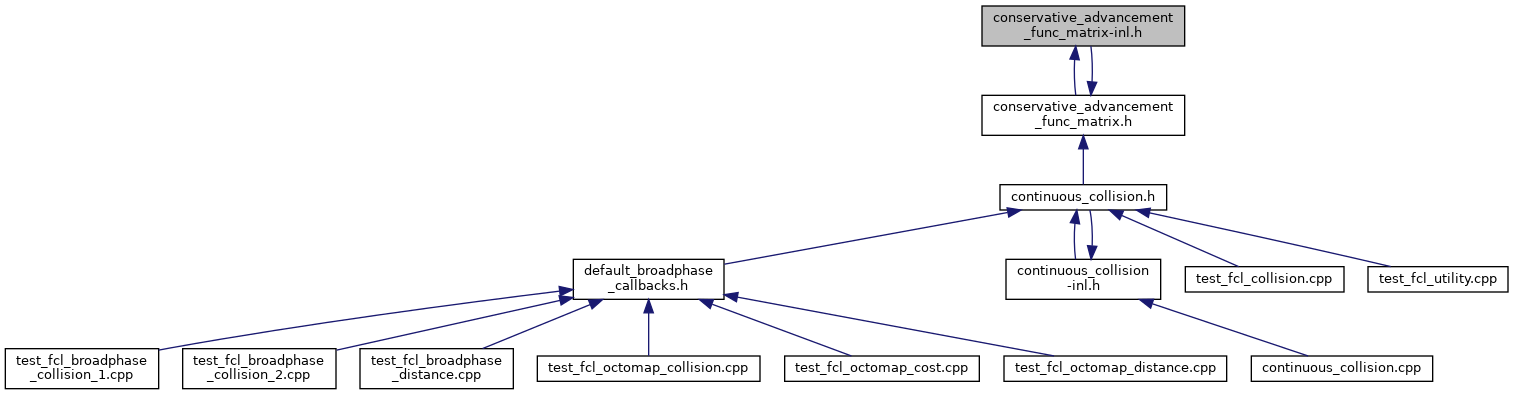
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| fcl | |
| Main namespace. | |
| fcl::detail | |
Functions | |
| template<typename BV , typename NarrowPhaseSolver > | |
| BV::S | fcl::detail::BVHConservativeAdvancement (const CollisionGeometry< typename BV::S > *o1, const MotionBase< typename BV::S > *motion1, const CollisionGeometry< typename BV::S > *o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const ContinuousCollisionRequest< typename BV::S > &request, ContinuousCollisionResult< typename BV::S > &result) |
| template<typename BV , typename Shape , typename NarrowPhaseSolver > | |
| BV::S | fcl::detail::BVHShapeConservativeAdvancement (const CollisionGeometry< typename BV::S > *o1, const MotionBase< typename BV::S > *motion1, const CollisionGeometry< typename BV::S > *o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const ContinuousCollisionRequest< typename BV::S > &request, ContinuousCollisionResult< typename BV::S > &result) |
| template<typename BV > | |
| bool | fcl::detail::conservativeAdvancement (const BVHModel< BV > &o1, const MotionBase< typename BV::S > *motion1, const BVHModel< BV > &o2, const MotionBase< typename BV::S > *motion2, const CollisionRequest< typename BV::S > &request, CollisionResult< typename BV::S > &result, typename BV::S &toc) |
| template<typename BV , typename Shape , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const BVHModel< BV > &o1, const MotionBase< typename BV::S > *motion1, const Shape &o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename BV::S > &request, CollisionResult< typename BV::S > &result, typename BV::S &toc) |
| template<typename Shape , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const BVHModel< OBBRSS< typename Shape::S >> &o1, const MotionBase< typename Shape::S > *motion1, const Shape &o2, const MotionBase< typename Shape::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename Shape::S > &request, CollisionResult< typename Shape::S > &result, typename Shape::S &toc) |
| template<typename Shape , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const BVHModel< RSS< typename Shape::S >> &o1, const MotionBase< typename Shape::S > *motion1, const Shape &o2, const MotionBase< typename Shape::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename Shape::S > &request, CollisionResult< typename Shape::S > &result, typename Shape::S &toc) |
| template<typename Shape , typename BV , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const Shape &o1, const MotionBase< typename BV::S > *motion1, const BVHModel< BV > &o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename BV::S > &request, CollisionResult< typename BV::S > &result, typename BV::S &toc) |
| template<typename Shape , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const Shape &o1, const MotionBase< typename Shape::S > *motion1, const BVHModel< OBBRSS< typename Shape::S >> &o2, const MotionBase< typename Shape::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename Shape::S > &request, CollisionResult< typename Shape::S > &result, typename Shape::S &toc) |
| template<typename Shape , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const Shape &o1, const MotionBase< typename Shape::S > *motion1, const BVHModel< RSS< typename Shape::S >> &o2, const MotionBase< typename Shape::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename Shape::S > &request, CollisionResult< typename Shape::S > &result, typename Shape::S &toc) |
| template<typename Shape1 , typename Shape2 , typename NarrowPhaseSolver > | |
| bool | fcl::detail::conservativeAdvancement (const Shape1 &o1, const MotionBase< typename Shape1::S > *motion1, const Shape2 &o2, const MotionBase< typename Shape1::S > *motion2, const NarrowPhaseSolver *solver, const CollisionRequest< typename Shape1::S > &request, CollisionResult< typename Shape1::S > &result, typename Shape1::S &toc) |
| template<typename BV , typename ConservativeAdvancementOrientedNode > | |
| bool | fcl::detail::conservativeAdvancementMeshOriented (const BVHModel< BV > &o1, const MotionBase< typename BV::S > *motion1, const BVHModel< BV > &o2, const MotionBase< typename BV::S > *motion2, const CollisionRequest< typename BV::S > &request, CollisionResult< typename BV::S > &result, typename BV::S &toc) |
| template<typename BV , typename Shape , typename NarrowPhaseSolver , typename ConservativeAdvancementOrientedNode > | |
| bool | fcl::detail::conservativeAdvancementMeshShapeOriented (const BVHModel< BV > &o1, const MotionBase< typename BV::S > *motion1, const Shape &o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename BV::S > &request, CollisionResult< typename BV::S > &result, typename BV::S &toc) |
| template<typename Shape , typename BV , typename NarrowPhaseSolver , typename ConservativeAdvancementOrientedNode > | |
| bool | fcl::detail::conservativeAdvancementShapeMeshOriented (const Shape &o1, const MotionBase< typename BV::S > *motion1, const BVHModel< BV > &o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const CollisionRequest< typename BV::S > &request, CollisionResult< typename BV::S > &result, typename BV::S &toc) |
| template<typename Shape , typename BV , typename NarrowPhaseSolver > | |
| BV::S | fcl::detail::ShapeBVHConservativeAdvancement (const CollisionGeometry< typename BV::S > *o1, const MotionBase< typename BV::S > *motion1, const CollisionGeometry< typename BV::S > *o2, const MotionBase< typename BV::S > *motion2, const NarrowPhaseSolver *nsolver, const ContinuousCollisionRequest< typename BV::S > &request, ContinuousCollisionResult< typename BV::S > &result) |
| template<typename Shape1 , typename Shape2 , typename NarrowPhaseSolver > | |
| Shape1::S | fcl::detail::ShapeConservativeAdvancement (const CollisionGeometry< typename Shape1::S > *o1, const MotionBase< typename Shape1::S > *motion1, const CollisionGeometry< typename Shape1::S > *o2, const MotionBase< typename Shape1::S > *motion2, const NarrowPhaseSolver *nsolver, const ContinuousCollisionRequest< typename Shape1::S > &request, ContinuousCollisionResult< typename Shape1::S > &result) |