#include <gtest/gtest.h>#include "Fixtures.h"#include "Human36Fixture.h"#include "rdl_dynamics/Dynamics.h"#include "rdl_dynamics/FramePoint.hpp"#include "rdl_dynamics/Kinematics.h"#include "rdl_dynamics/Model.h"#include "UnitTestUtils.hpp"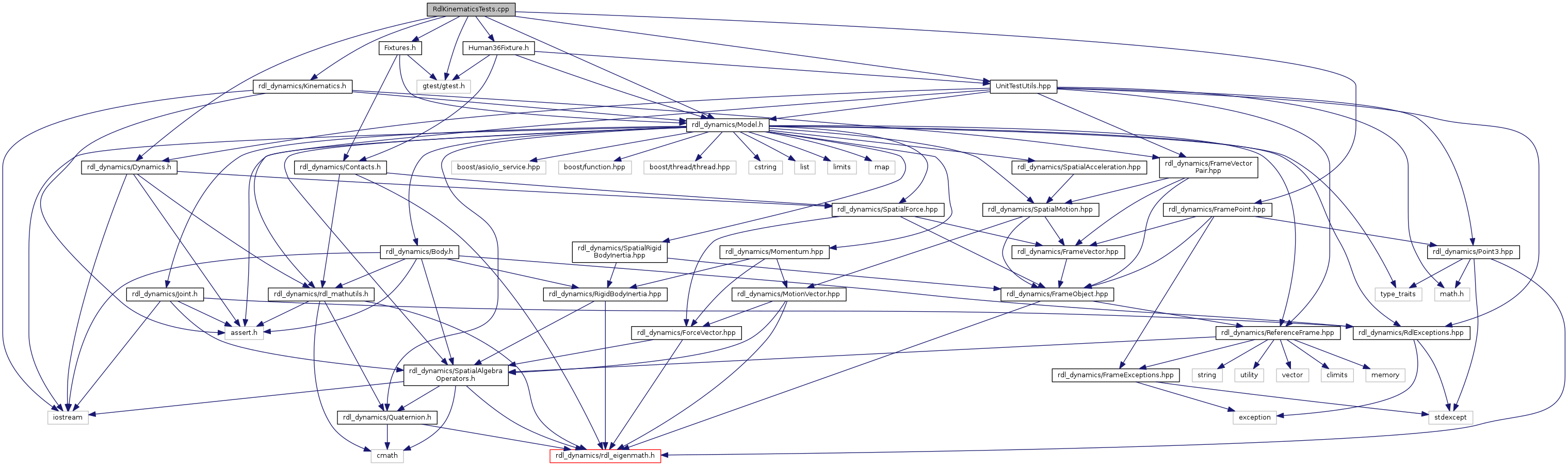
Go to the source code of this file.
Classes | |
| struct | RdlKinematicsFixture |
| struct | RdlKinematicsSingleChainFixture |
| struct | RdlKinematicsSingleChainFixture6DoF |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (RdlKinematicsFixture, parallelKinematics) | |
| TEST_F (RdlKinematicsFixture, parallelKinematicsCustom) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestPositionNeutral) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestPositionBaseRotated90Deg) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestPositionBaseRotatedNeg45Deg) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestPositionBodyBRotated90Deg) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestPositionBodyBRotatedNeg45Deg) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestCalcBodyToBaseCoordinates) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestCalcBodyToBaseCoordinatesRotated) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcRelativeBodySpatialJacobian) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcPointJacobianFrames) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcPointJacobian6DFrames) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcRelativePointJacobian6DFrames) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcPointJacobianDotFrames) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcRelativeBodySpatialJacobianDot) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcRelativeBodySpatialJacobianAndJacobianDot) | |
| TEST_F (SimpleFixture, calcRelativeBodySpatialJacobianDot) | |
| TEST_F (SimpleFixture, calcRelativeBodySpatialJacobianAndJacobianDot) | |
| TEST_F (FloatingBaseWith2SingleDofJoints, calcRelativeBodySpatialJacobian) | |
| TEST_F (FloatingBaseWith2SingleDofJoints, calcRelativeBodySpatialJacobianDot) | |
| TEST_F (FloatingBaseWith2SingleDofJoints, calcRelativeBodySpatialJacobianAndJacobianDot) | |
| TEST_F (RotZRotZYXFixed, calcRelativeBodySpatialJacobian) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobian) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobianDotEmulated) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobianAndJacobianDotEmulated) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobianDot3Dof) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobianAndJacobianDot3Dof) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobianDot3DofFixedBody) | |
| TEST_F (Human36, calcRelativeBodySpatialJacobianAndJacobianDot3DofFixedBody) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestCalcPointJacobian) | |
| TEST_F (RdlKinematicsSingleChainFixture, TestInverseKinematicSimple) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, TestInverseKinematicUnreachable) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, TestInverseKinematicTwoPoints) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, FixedJointBodyCalcBodyToBase) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, FixedJointBodyCalcBodyToBaseRotated) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, FixedJointBodyCalcBaseToBody) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, FixedJointBodyCalcBaseToBodyRotated) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, FixedJointBodyWorldOrientation) | |
| TEST_F (RdlKinematicsSingleChainFixture6DoF, FixedJointCalcPointJacobian) | |
| TEST_F (Human36, SpatialJacobianSimple) | |
| TEST_F (Human36, SpatialJacobianFixedBody) | |
| TEST_F (Human36, CalcPointJacobian6D) | |
| TEST_F (Human36, CalcPointJacobian6DRelative) | |
| TEST_F (Human36, CalcPointVelocity6D) | |
| TEST_F (Human36, CalcPointVelocity6DFrames) | |
| TEST_F (RdlKinematicsSingleChainFixture, CalcPointVelocity6D) | |
| TEST_F (Human36, CalcPointVelocity6DFixedBody) | |
| TEST_F (Human36, CalcPointJacobianDot6D) | |
| TEST_F (Human36, CalcPointJacobianDot6DFrame) | |
| TEST_F (Human36, CalcRelativePointJacobianDot6D) | |
| TEST_F (Human36, CalcRelativePointJacobianAndJacobianDot6D) | |
| TEST_F (Human36, CalcPointAcceleration6DFixedFrames) | |
| TEST_F (Human36, CalcPointAccelerationDot6DFrames) | |
| TEST_F (Human36, CalcPointAccelerationDot6DFramesModel3Dof) | |
| TEST_F (Human36, CalcPointAccelerationDot) | |
| TEST_F (Human36, CalcPointAcceleration) | |
| TEST_F (Human36, CalcPointAccelerationFixedBody) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcSpatialVelocity) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcBodySpatialJacobianDot) | |
| TEST_F (RdlKinematicsSingleChainFixture, calcSpatialAcceleration) | |
| TEST_F (Human36, calcBodySpatialJacobianDot) | |
Variables | |
| const double | TEST_PREC = 1.0e-12 |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 2516 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsFixture | , |
| parallelKinematics | |||
| ) |
Definition at line 184 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsFixture | , |
| parallelKinematicsCustom | |||
| ) |
Definition at line 260 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestPositionNeutral | |||
| ) |
Definition at line 370 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestPositionBaseRotated90Deg | |||
| ) |
Definition at line 388 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestPositionBaseRotatedNeg45Deg | |||
| ) |
Definition at line 408 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestPositionBodyBRotated90Deg | |||
| ) |
Definition at line 428 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestPositionBodyBRotatedNeg45Deg | |||
| ) |
Definition at line 448 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestCalcBodyToBaseCoordinates | |||
| ) |
Definition at line 470 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestCalcBodyToBaseCoordinatesRotated | |||
| ) |
Definition at line 479 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcRelativeBodySpatialJacobian | |||
| ) |
Definition at line 524 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcPointJacobianFrames | |||
| ) |
Definition at line 542 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcPointJacobian6DFrames | |||
| ) |
Definition at line 584 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcRelativePointJacobian6DFrames | |||
| ) |
Definition at line 640 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcPointJacobianDotFrames | |||
| ) |
Definition at line 701 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcRelativeBodySpatialJacobianDot | |||
| ) |
Definition at line 743 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcRelativeBodySpatialJacobianAndJacobianDot | |||
| ) |
Definition at line 765 of file RdlKinematicsTests.cpp.
| TEST_F | ( | SimpleFixture | , |
| calcRelativeBodySpatialJacobianDot | |||
| ) |
Definition at line 793 of file RdlKinematicsTests.cpp.
| TEST_F | ( | SimpleFixture | , |
| calcRelativeBodySpatialJacobianAndJacobianDot | |||
| ) |
Definition at line 833 of file RdlKinematicsTests.cpp.
| TEST_F | ( | FloatingBaseWith2SingleDofJoints | , |
| calcRelativeBodySpatialJacobian | |||
| ) |
Definition at line 878 of file RdlKinematicsTests.cpp.
| TEST_F | ( | FloatingBaseWith2SingleDofJoints | , |
| calcRelativeBodySpatialJacobianDot | |||
| ) |
Definition at line 896 of file RdlKinematicsTests.cpp.
| TEST_F | ( | FloatingBaseWith2SingleDofJoints | , |
| calcRelativeBodySpatialJacobianAndJacobianDot | |||
| ) |
Definition at line 920 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RotZRotZYXFixed | , |
| calcRelativeBodySpatialJacobian | |||
| ) |
Definition at line 948 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobian | |||
| ) |
Definition at line 985 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobianDotEmulated | |||
| ) |
Definition at line 1006 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobianAndJacobianDotEmulated | |||
| ) |
Definition at line 1031 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobianDot3Dof | |||
| ) |
Definition at line 1061 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobianAndJacobianDot3Dof | |||
| ) |
Definition at line 1088 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobianDot3DofFixedBody | |||
| ) |
Definition at line 1117 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcRelativeBodySpatialJacobianAndJacobianDot3DofFixedBody | |||
| ) |
Definition at line 1159 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestCalcPointJacobian | |||
| ) |
Definition at line 1210 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| TestInverseKinematicSimple | |||
| ) |
Definition at line 1287 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| TestInverseKinematicUnreachable | |||
| ) |
Definition at line 1318 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| TestInverseKinematicTwoPoints | |||
| ) |
Definition at line 1350 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| FixedJointBodyCalcBodyToBase | |||
| ) |
Definition at line 1388 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| FixedJointBodyCalcBodyToBaseRotated | |||
| ) |
Definition at line 1411 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| FixedJointBodyCalcBaseToBody | |||
| ) |
Definition at line 1436 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| FixedJointBodyCalcBaseToBodyRotated | |||
| ) |
Definition at line 1460 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| FixedJointBodyWorldOrientation | |||
| ) |
Definition at line 1486 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture6DoF | , |
| FixedJointCalcPointJacobian | |||
| ) |
Definition at line 1511 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| SpatialJacobianSimple | |||
| ) |
Definition at line 1543 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| SpatialJacobianFixedBody | |||
| ) |
Definition at line 1566 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointJacobian6D | |||
| ) |
Definition at line 1587 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointJacobian6DRelative | |||
| ) |
Definition at line 1609 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointVelocity6D | |||
| ) |
Definition at line 1659 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointVelocity6DFrames | |||
| ) |
Definition at line 1683 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| CalcPointVelocity6D | |||
| ) |
Definition at line 1698 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointVelocity6DFixedBody | |||
| ) |
Definition at line 1733 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointJacobianDot6D | |||
| ) |
Definition at line 1756 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointJacobianDot6DFrame | |||
| ) |
Definition at line 1796 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcRelativePointJacobianDot6D | |||
| ) |
Definition at line 1844 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcRelativePointJacobianAndJacobianDot6D | |||
| ) |
Definition at line 1935 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointAcceleration6DFixedFrames | |||
| ) |
Definition at line 2006 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointAccelerationDot6DFrames | |||
| ) |
Definition at line 2060 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointAccelerationDot6DFramesModel3Dof | |||
| ) |
Definition at line 2092 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointAccelerationDot | |||
| ) |
Definition at line 2123 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointAcceleration | |||
| ) |
Definition at line 2160 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| CalcPointAccelerationFixedBody | |||
| ) |
Definition at line 2191 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcSpatialVelocity | |||
| ) |
Definition at line 2226 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcBodySpatialJacobianDot | |||
| ) |
Definition at line 2363 of file RdlKinematicsTests.cpp.
| TEST_F | ( | RdlKinematicsSingleChainFixture | , |
| calcSpatialAcceleration | |||
| ) |
Definition at line 2420 of file RdlKinematicsTests.cpp.
| TEST_F | ( | Human36 | , |
| calcBodySpatialJacobianDot | |||
| ) |
Definition at line 2483 of file RdlKinematicsTests.cpp.
Variable Documentation
| const double TEST_PREC = 1.0e-12 |
Definition at line 15 of file RdlKinematicsTests.cpp.