|
| void | create_snapshot (std::shared_ptr< depth_sensor > &snapshot) const override |
| |
| void | create_snapshot (std::shared_ptr< l500_depth_sensor_interface > &snapshot) const override |
| |
| void | enable_recording (std::function< void(const depth_sensor &)> recording_function) override |
| |
| void | enable_recording (std::function< void(const l500_depth_sensor_interface &)> recording_function) override |
| |
| stream_profiles | get_debug_stream_profiles () const override |
| |
| float | get_depth_offset () const |
| |
| float | get_depth_scale () const override |
| |
| rs2_dsm_params | get_dsm_params () const override |
| |
| ivcam2::intrinsic_depth | get_intrinsic () const override |
| |
| rs2_intrinsics | get_intrinsics (const stream_profile &profile) const override |
| |
| float | get_max_usable_depth_range () const override |
| |
| processing_blocks | get_recommended_processing_blocks () const override |
| |
| std::vector< rs2_option > | get_supported_options () const override |
| |
| stream_profiles | init_stream_profiles () override |
| |
| std::shared_ptr< stream_profile_interface > | is_color_sensor_needed () const |
| |
| bool | is_max_range_preset () const |
| |
| | l500_depth_sensor (l500_device *owner, std::shared_ptr< uvc_sensor > uvc_sensor, std::map< uint32_t, rs2_format > l500_depth_sourcc_to_rs2_format_map, std::map< uint32_t, rs2_stream > l500_depth_sourcc_to_rs2_stream_map) |
| |
| void | open (const stream_profiles &requests) override |
| |
| void | override_dsm_params (rs2_dsm_params const &dsm_params) override |
| |
| void | override_extrinsics (rs2_extrinsics const &extr) override |
| |
| void | override_intrinsics (rs2_intrinsics const &intr) override |
| |
| int | read_algo_version () |
| |
| float | read_baseline () const override |
| |
| float | read_znorm () |
| |
| void | reset_calibration () override |
| |
| void | start (frame_callback_ptr callback) override |
| |
| void | stop () override |
| |
| | ~l500_depth_sensor () |
| |
| void | close () override |
| |
| frame_callback_ptr | get_frames_callback () const override |
| |
| std::shared_ptr< sensor_base > | get_raw_sensor () const |
| |
| bool | is_opened () const override |
| |
| bool | is_streaming () const override |
| |
| void | open (const stream_profiles &requests) override |
| |
| int | register_before_streaming_changes_callback (std::function< void(bool)> callback) override |
| |
| void | register_metadata (rs2_frame_metadata_value metadata, std::shared_ptr< md_attribute_parser_base > metadata_parser) const override |
| |
| void | register_notifications_callback (notifications_callback_ptr callback) override |
| |
| virtual void | register_option (rs2_option id, std::shared_ptr< option > option) |
| |
| void | register_processing_block (const std::vector< stream_profile > &from, const std::vector< stream_profile > &to, std::function< std::shared_ptr< processing_block >(void)> generate_func) |
| |
| void | register_processing_block (const processing_block_factory &pbf) |
| |
| void | register_processing_block (const std::vector< processing_block_factory > &pbfs) |
| |
| void | register_pu (rs2_option id) |
| |
| void | set_frames_callback (frame_callback_ptr callback) override |
| |
| void | start (frame_callback_ptr callback) override |
| |
| void | stop () override |
| |
| | synthetic_sensor (std::string name, std::shared_ptr< sensor_base > sensor, device *device, const std::map< uint32_t, rs2_format > &fourcc_to_rs2_format_map=std::map< uint32_t, rs2_format >(), const std::map< uint32_t, rs2_stream > &fourcc_to_rs2_stream_map=std::map< uint32_t, rs2_stream >()) |
| |
| virtual bool | try_register_option (rs2_option id, std::shared_ptr< option > option) |
| |
| bool | try_register_pu (rs2_option id) |
| |
| void | unregister_before_start_callback (int token) override |
| |
| void | unregister_option (rs2_option id) |
| |
| | ~synthetic_sensor () override |
| |
| rs2_format | fourcc_to_rs2_format (uint32_t format) const |
| |
| rs2_stream | fourcc_to_rs2_stream (uint32_t fourcc_format) const |
| |
| stream_profiles | get_active_streams () const override |
| |
| device_interface & | get_device () override |
| |
| std::shared_ptr< std::map< uint32_t, rs2_format > > & | get_fourcc_to_rs2_format_map () |
| |
| std::shared_ptr< std::map< uint32_t, rs2_stream > > & | get_fourcc_to_rs2_stream_map () |
| |
| const std::string & | get_info (rs2_camera_info info) const override |
| |
| notifications_callback_ptr | get_notifications_callback () const override |
| |
| virtual std::shared_ptr< notifications_processor > | get_notifications_processor () const |
| |
| processing_blocks | get_recommended_processing_blocks () const override |
| |
| stream_profiles | get_stream_profiles (int tag=profile_tag::PROFILE_TAG_ANY) const override |
| |
| void | register_on_open (on_open callback) |
| |
| | sensor_base (std::string name, device *device, recommended_proccesing_blocks_interface *owner) |
| |
| void | set_source_owner (sensor_base *owner) |
| |
| bool | supports_info (rs2_camera_info info) const override |
| |
| virtual | ~sensor_base () override |
| |
| virtual | ~sensor_interface ()=default |
| |
| virtual | ~info_interface ()=default |
| |
| virtual | ~recordable ()=default |
| |
| virtual | ~options_interface ()=default |
| |
| virtual | ~recordable ()=default |
| |
| virtual | ~recommended_proccesing_blocks_interface ()=default |
| |
| void | create_snapshot (std::shared_ptr< options_interface > &snapshot) const override |
| |
| void | enable_recording (std::function< void(const options_interface &)> record_action) override |
| |
| option & | get_option (rs2_option id) override |
| |
| const option & | get_option (rs2_option id) const override |
| |
| std::shared_ptr< option > | get_option_handler (rs2_option id) |
| |
| std::shared_ptr< option > | get_option_handler (rs2_option id) const |
| |
| virtual const char * | get_option_name (rs2_option option) const override |
| |
| void | register_option (rs2_option id, std::shared_ptr< option > option) |
| |
| bool | supports_option (rs2_option id) const override |
| |
| void | unregister_option (rs2_option id) |
| |
| void | update (std::shared_ptr< extension_snapshot > ext) override |
| |
| virtual | ~extension_snapshot ()=default |
| |
| void | create_snapshot (std::shared_ptr< info_interface > &snapshot) const override |
| |
| void | enable_recording (std::function< void(const info_interface &)> record_action) override |
| |
| void | register_info (rs2_camera_info info, const std::string &val) |
| |
| void | update (std::shared_ptr< extension_snapshot > ext) override |
| |
| void | update_info (rs2_camera_info info, const std::string &val) |
| |
| virtual void | create_snapshot (std::shared_ptr< recommended_proccesing_blocks_interface > &snapshot) const override |
| |
| virtual void | enable_recording (std::function< void(const recommended_proccesing_blocks_interface &)> recording_function) override |
| |
| | recommended_proccesing_blocks_base (recommended_proccesing_blocks_interface *owner) |
| |
| virtual | ~recordable ()=default |
| |
| virtual | ~depth_sensor ()=default |
| |
| virtual | ~recordable ()=default |
| |
| virtual | ~l500_depth_sensor_interface ()=default |
| |
| virtual | ~recordable ()=default |
| |
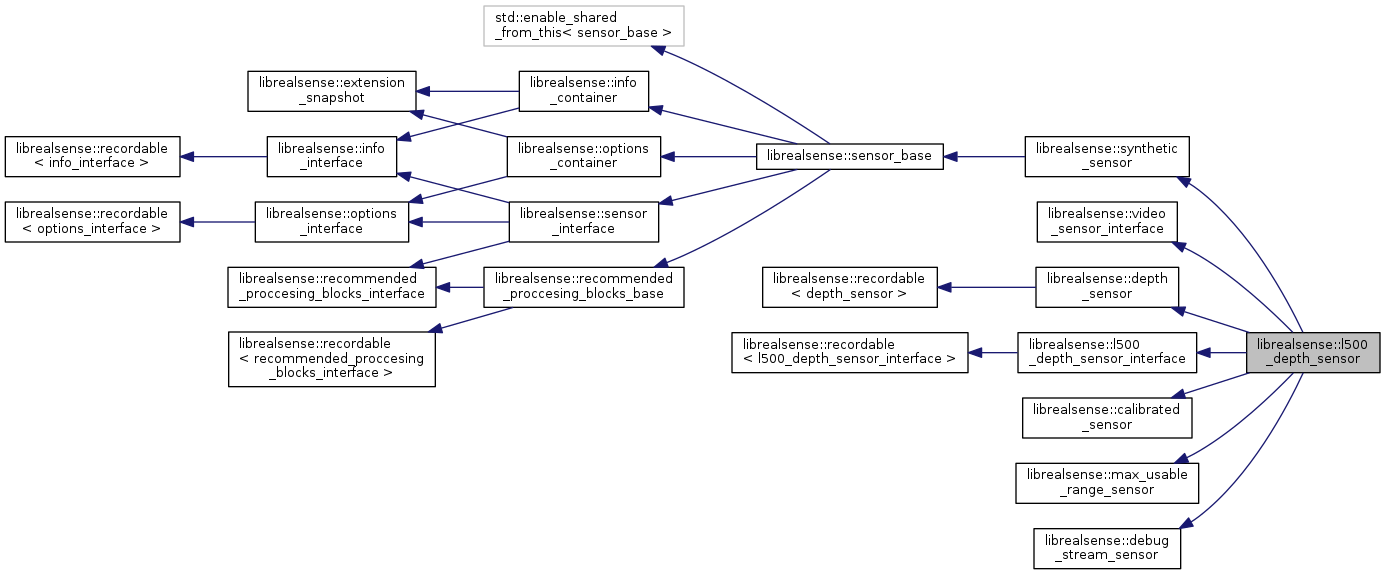
Definition at line 90 of file l500-depth.h.
 Public Member Functions inherited from
Public Member Functions inherited from