|
| void | cloud_cb (const sensor_msgs::PointCloud2::ConstPtr &) |
| |
| void | estimatePointCloudNormals (const pcl::PointCloud< PointT >::Ptr, pcl::PointCloud< pcl::Normal >::Ptr, const int=8, const double=0.02, bool=true) |
| |
| void | getConvexLabelCloudIndices (const std::vector< pcl::PointCloud< PointT >::Ptr > &, pcl::PointCloud< PointT >::Ptr, const std::vector< int > &, std::map< int, pcl::PointIndices > &) |
| |
| void | indices_cb (const jsk_recognition_msgs::ClusterPointIndices &) |
| |
| void | nearestNeigborSearch (pcl::PointCloud< pcl::PointXYZ >::Ptr, std::vector< std::vector< int > > &, const int=8, const double=0.02, bool=true) |
| |
| virtual void | onInit () |
| |
| void | segmentCloud (const pcl::PointCloud< PointT >::Ptr, const std::vector< pcl::PointIndices > &, std::vector< pcl::PointCloud< PointT >::Ptr > &, std::vector< pcl::PointCloud< pcl::Normal >::Ptr > &, pcl::PointCloud< pcl::PointXYZ >::Ptr) |
| |
| virtual void | subscribe () |
| |
| virtual void | unsubscribe () |
| |
| virtual void | updateDiagnostic (diagnostic_updater::DiagnosticStatusWrapper &stat) |
| |
| ros::Publisher | advertise (ros::NodeHandle &nh, std::string topic, int queue_size) |
| |
| image_transport::CameraPublisher | advertiseCamera (ros::NodeHandle &nh, image_transport::ImageTransport &it, const std::string &topic, int queue_size) |
| |
| image_transport::CameraPublisher | advertiseCamera (ros::NodeHandle &nh, const std::string &topic, int queue_size) |
| |
| image_transport::Publisher | advertiseImage (ros::NodeHandle &nh, image_transport::ImageTransport &it, const std::string &topic, int queue_size) |
| |
| image_transport::Publisher | advertiseImage (ros::NodeHandle &nh, const std::string &topic, int queue_size) |
| |
| virtual void | cameraConnectionBaseCallback () |
| |
| virtual void | cameraConnectionCallback (const image_transport::SingleSubscriberPublisher &pub) |
| |
| virtual void | cameraInfoConnectionCallback (const ros::SingleSubscriberPublisher &pub) |
| |
| virtual void | connectionCallback (const ros::SingleSubscriberPublisher &pub) |
| |
| virtual void | imageConnectionCallback (const image_transport::SingleSubscriberPublisher &pub) |
| |
| virtual bool | isSubscribed () |
| |
| virtual void | onInitPostProcess () |
| |
| virtual void | warnNeverSubscribedCallback (const ros::WallTimerEvent &event) |
| |
| virtual void | warnOnInitPostProcessCalledCallback (const ros::WallTimerEvent &event) |
| |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| |
| ros::NodeHandle & | getMTNodeHandle () const |
| |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| |
| const V_string & | getMyArgv () const |
| |
| const std::string & | getName () const |
| |
| ros::NodeHandle & | getNodeHandle () const |
| |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| |
| const M_string & | getRemappingArgs () const |
| |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| |
| std::string | getSuffixedName (const std::string &suffix) const |
| |
Definition at line 82 of file convex_connected_voxels.h.
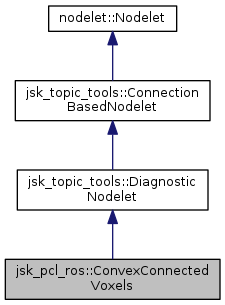
 Public Types inherited from jsk_topic_tools::DiagnosticNodelet
Public Types inherited from jsk_topic_tools::DiagnosticNodelet