#include <btCollisionAlgorithm.h>
Public Member Functions | |
| btCollisionAlgorithm () | |
| btCollisionAlgorithm (const btCollisionAlgorithmConstructionInfo &ci) | |
| virtual btScalar | calculateTimeOfImpact (btCollisionObject *body0, btCollisionObject *body1, const btDispatcherInfo &dispatchInfo, btManifoldResult *resultOut)=0 |
| virtual void | getAllContactManifolds (btManifoldArray &manifoldArray)=0 |
| virtual void | processCollision (btCollisionObject *body0, btCollisionObject *body1, const btDispatcherInfo &dispatchInfo, btManifoldResult *resultOut)=0 |
| virtual | ~btCollisionAlgorithm () |
Protected Attributes | |
| btDispatcher * | m_dispatcher |
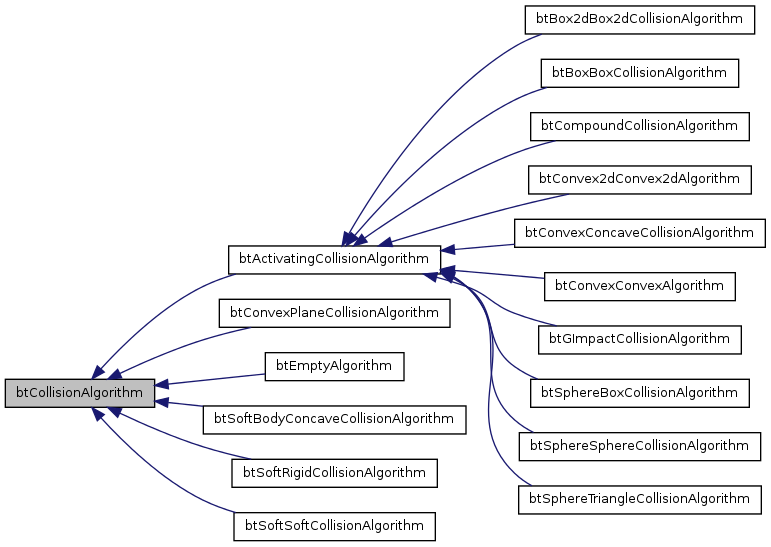
btCollisionAlgorithm is an collision interface that is compatible with the Broadphase and btDispatcher. It is persistent over frames
Definition at line 54 of file btCollisionAlgorithm.h.
| btCollisionAlgorithm::btCollisionAlgorithm | ( | ) | [inline] |
Definition at line 66 of file btCollisionAlgorithm.h.
| virtual btCollisionAlgorithm::~btCollisionAlgorithm | ( | ) | [inline, virtual] |
Definition at line 70 of file btCollisionAlgorithm.h.
| virtual btScalar btCollisionAlgorithm::calculateTimeOfImpact | ( | btCollisionObject * | body0, |
| btCollisionObject * | body1, | ||
| const btDispatcherInfo & | dispatchInfo, | ||
| btManifoldResult * | resultOut | ||
| ) | [pure virtual] |
Implemented in btGImpactCollisionAlgorithm, btSoftBodyConcaveCollisionAlgorithm, btConvexConcaveCollisionAlgorithm, btConvexConvexAlgorithm, btConvex2dConvex2dAlgorithm, btCompoundCollisionAlgorithm, btSoftRigidCollisionAlgorithm, btConvexPlaneCollisionAlgorithm, btSphereBoxCollisionAlgorithm, btSoftSoftCollisionAlgorithm, btSphereSphereCollisionAlgorithm, btSphereTriangleCollisionAlgorithm, btBox2dBox2dCollisionAlgorithm, btBoxBoxCollisionAlgorithm, and btEmptyAlgorithm.
| virtual void btCollisionAlgorithm::getAllContactManifolds | ( | btManifoldArray & | manifoldArray | ) | [pure virtual] |
Implemented in btGImpactCollisionAlgorithm, btSoftBodyConcaveCollisionAlgorithm, btConvexConcaveCollisionAlgorithm, btConvexConvexAlgorithm, btConvex2dConvex2dAlgorithm, btCompoundCollisionAlgorithm, btSoftRigidCollisionAlgorithm, btConvexPlaneCollisionAlgorithm, btSphereBoxCollisionAlgorithm, btSoftSoftCollisionAlgorithm, btBox2dBox2dCollisionAlgorithm, btBoxBoxCollisionAlgorithm, btSphereSphereCollisionAlgorithm, btSphereTriangleCollisionAlgorithm, and btEmptyAlgorithm.
| virtual void btCollisionAlgorithm::processCollision | ( | btCollisionObject * | body0, |
| btCollisionObject * | body1, | ||
| const btDispatcherInfo & | dispatchInfo, | ||
| btManifoldResult * | resultOut | ||
| ) | [pure virtual] |
Implemented in btGImpactCollisionAlgorithm, btSoftBodyConcaveCollisionAlgorithm, btConvexConcaveCollisionAlgorithm, btConvexConvexAlgorithm, btConvex2dConvex2dAlgorithm, btCompoundCollisionAlgorithm, btSoftRigidCollisionAlgorithm, btConvexPlaneCollisionAlgorithm, btSphereBoxCollisionAlgorithm, btSoftSoftCollisionAlgorithm, btSphereSphereCollisionAlgorithm, btSphereTriangleCollisionAlgorithm, btBox2dBox2dCollisionAlgorithm, btBoxBoxCollisionAlgorithm, and btEmptyAlgorithm.
btDispatcher* btCollisionAlgorithm::m_dispatcher [protected] |
Definition at line 59 of file btCollisionAlgorithm.h.

