#include <inttypes.h>
#include <vector>
#include <stdlib.h>
#include <string.h>
#include <mutex>
#include <condition_variable>
#include <netinet/in.h>
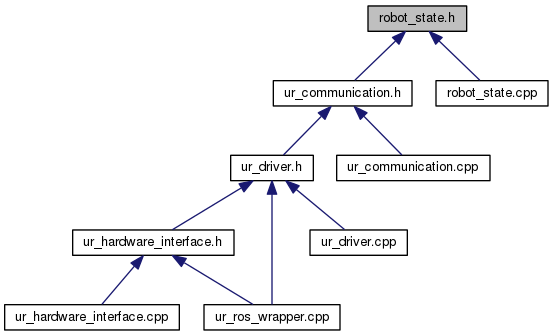
Go to the source code of this file.
Classes |
| struct | masterboard_data |
| struct | robot_mode_data |
| class | RobotState |
| struct | version_message |
Namespaces |
| namespace | message_types |
| namespace | package_types |
| namespace | robot_message_types |
| namespace | robot_state_type_v18 |
| namespace | robot_state_type_v30 |
Typedefs |
| typedef message_types::message_type | messageType |
| typedef package_types::package_type | packageType |
typedef
robot_message_types::robot_message_type | robotMessageType |
typedef
robot_state_type_v18::robot_state_type | robotStateTypeV18 |
typedef
robot_state_type_v30::robot_state_type | robotStateTypeV30 |
Enumerations |
| enum | message_types::message_type { message_types::ROBOT_STATE = 16,
message_types::ROBOT_MESSAGE = 20,
message_types::PROGRAM_STATE_MESSAGE = 25
} |
| enum | package_types::package_type {
package_types::ROBOT_MODE_DATA = 0,
package_types::JOINT_DATA = 1,
package_types::TOOL_DATA = 2,
package_types::MASTERBOARD_DATA = 3,
package_types::CARTESIAN_INFO = 4,
package_types::KINEMATICS_INFO = 5,
package_types::CONFIGURATION_DATA = 6,
package_types::FORCE_MODE_DATA = 7,
package_types::ADDITIONAL_INFO = 8,
package_types::CALIBRATION_DATA = 9
} |
| enum | robot_message_types::robot_message_type {
robot_message_types::ROBOT_MESSAGE_TEXT = 0,
robot_message_types::ROBOT_MESSAGE_PROGRAM_LABEL = 1,
robot_message_types::PROGRAM_STATE_MESSAGE_VARIABLE_UPDATE = 2,
robot_message_types::ROBOT_MESSAGE_VERSION = 3,
robot_message_types::ROBOT_MESSAGE_SAFETY_MODE = 5,
robot_message_types::ROBOT_MESSAGE_ERROR_CODE = 6,
robot_message_types::ROBOT_MESSAGE_KEY = 7,
robot_message_types::ROBOT_MESSAGE_REQUEST_VALUE = 9,
robot_message_types::ROBOT_MESSAGE_RUNTIME_EXCEPTION = 10
} |
| enum | robot_state_type_v18::robot_state_type {
robot_state_type_v18::ROBOT_RUNNING_MODE = 0,
robot_state_type_v18::ROBOT_FREEDRIVE_MODE = 1,
robot_state_type_v18::ROBOT_READY_MODE = 2,
robot_state_type_v18::ROBOT_INITIALIZING_MODE = 3,
robot_state_type_v18::ROBOT_SECURITY_STOPPED_MODE = 4,
robot_state_type_v18::ROBOT_EMERGENCY_STOPPED_MODE = 5,
robot_state_type_v18::ROBOT_FATAL_ERROR_MODE = 6,
robot_state_type_v18::ROBOT_NO_POWER_MODE = 7,
robot_state_type_v18::ROBOT_NOT_CONNECTED_MODE = 8,
robot_state_type_v18::ROBOT_SHUTDOWN_MODE = 9,
robot_state_type_v18::ROBOT_SAFEGUARD_STOP_MODE = 10
} |
| enum | robot_state_type_v30::robot_state_type {
robot_state_type_v30::ROBOT_MODE_DISCONNECTED = 0,
robot_state_type_v30::ROBOT_MODE_CONFIRM_SAFETY = 1,
robot_state_type_v30::ROBOT_MODE_BOOTING = 2,
robot_state_type_v30::ROBOT_MODE_POWER_OFF = 3,
robot_state_type_v30::ROBOT_MODE_POWER_ON = 4,
robot_state_type_v30::ROBOT_MODE_IDLE = 5,
robot_state_type_v30::ROBOT_MODE_BACKDRIVE = 6,
robot_state_type_v30::ROBOT_MODE_RUNNING = 7,
robot_state_type_v30::ROBOT_MODE_UPDATING_FIRMWARE = 8
} |
Typedef Documentation