#include <CameraTango.h>
Public Member Functions | |
| CameraTango (bool colorCamera, int decimation, bool publishRawScan, bool smoothing) | |
| virtual void | close () |
| void | cloudReceived (const cv::Mat &cloud, double timestamp) |
| virtual std::string | getSerial () const |
| virtual bool | init (const std::string &calibrationFolder=".", const std::string &cameraName="") |
| void | rgbReceived (const cv::Mat &tangoImage, int type, double timestamp) |
| void | setDecimation (int value) |
| void | setRawScanPublished (bool enabled) |
| void | tangoEventReceived (int type, const char *key, const char *value) |
| rtabmap::Transform | tangoPoseToTransform (const TangoPoseData *tangoPose) const |
| virtual | ~CameraTango () |
 Public Member Functions inherited from rtabmap::CameraMobile Public Member Functions inherited from rtabmap::CameraMobile | |
| void | addEnvSensor (int type, float value) |
| CameraMobile (bool smoothing=false, float upstreamRelocalizationAccThr=0.0f) | |
| const CameraModel & | getCameraModel () const |
| const Transform & | getDeviceTColorCamera () const |
| const cv::Mat & | getOcclusionImage (CameraModel *model=0) const |
| virtual bool | getPose (double epochStamp, Transform &pose, cv::Mat &covariance, double maxWaitTime=0.06) |
| ScreenRotation | getScreenRotation () const |
| double | getStampEpochOffset () const |
| GLuint | getTextureId () |
| void | getVPMatrices (glm::mat4 &view, glm::mat4 &projection) const |
| virtual bool | isCalibrated () const |
| virtual bool | odomProvided () const |
| void | poseReceived (const Transform &pose, double deviceStamp) |
| void | resetOrigin (const rtabmap::Transform &offset=rtabmap::Transform()) |
| void | setGPS (const GPS &gps) |
| void | setOcclusionImage (const cv::Mat &image, const CameraModel &model) |
| virtual void | setScreenRotationAndSize (ScreenRotation colorCameraToDisplayRotation, int width, int height) |
| void | setSmoothing (bool enabled) |
| void | update (const SensorData &data, const Transform &pose, const glm::mat4 &viewMatrix, const glm::mat4 &projectionMatrix, const float *texCoord) |
| void | updateOnRender () |
| bool | uvsInitialized () const |
| const float * | uvsTransformed () const |
| virtual | ~CameraMobile () |
| Public Member Functions inherited from rtabmap::Camera | |
| float | getImageRate () const |
| bool | initFromFile (const std::string &calibrationPath) |
| bool | isInterIMUPublishing () const |
| void | setImageRate (float imageRate) |
| void | setInterIMUPublishing (bool enabled, IMUFilter *filter=0) |
| SensorData | takeImage (SensorCaptureInfo *info=0) |
| virtual | ~Camera () |
| Public Member Functions inherited from rtabmap::SensorCapture | |
| float | getFrameRate () const |
| const Transform & | getLocalTransform () const |
| void | resetTimer () |
| void | setFrameRate (float frameRate) |
| void | setLocalTransform (const Transform &localTransform) |
| SensorData | takeData (SensorCaptureInfo *info=0) |
| virtual | ~SensorCapture () |
| Public Member Functions inherited from UEventsSender | |
| UEventsSender () | |
| virtual | ~UEventsSender () |
Protected Member Functions | |
| virtual SensorData | updateDataOnRender (Transform &pose) |
| Protected Member Functions inherited from rtabmap::Camera | |
| Camera (float imageRate=0, const Transform &localTransform=Transform::getIdentity()) | |
| void | postInterIMU (const IMU &imu, double stamp) |
| Protected Member Functions inherited from rtabmap::SensorCapture | |
| int | getNextSeqID () |
| SensorCapture (float frameRate=0, const Transform &localTransform=Transform::getIdentity()) | |
| Protected Member Functions inherited from UEventsSender | |
| void | post (UEvent *event, bool async=true) const |
Private Member Functions | |
| rtabmap::Transform | getPoseAtTimestamp (double timestamp) |
Private Attributes | |
| bool | colorCamera_ |
| int | decimation_ |
| cv::Mat | fisheyeRectifyMapX_ |
| cv::Mat | fisheyeRectifyMapY_ |
| bool | rawScanPublished_ |
| void * | tango_config_ |
| cv::Mat | tangoColor_ |
| double | tangoColorStamp_ |
| int | tangoColorType_ |
| SensorData | tangoData_ |
| boost::mutex | tangoDataMutex_ |
| USemaphore | tangoDataReady_ |
Additional Inherited Members | |
| Static Public Member Functions inherited from rtabmap::CameraMobile | |
| static LaserScan | scanFromPointCloudData (const cv::Mat &pointCloudData, const Transform &pose, const CameraModel &model, const cv::Mat &rgb, std::vector< cv::KeyPoint > *kpts=0, std::vector< cv::Point3f > *kpts3D=0, int kptsSize=3) |
| Static Public Attributes inherited from rtabmap::CameraMobile | |
| static const float | bilateralFilteringSigmaR = 0.075f |
| static const float | bilateralFilteringSigmaS = 2.0f |
| static const rtabmap::Transform | opticalRotation |
| static const rtabmap::Transform | opticalRotationInv |
| Protected Attributes inherited from rtabmap::CameraMobile | |
| Transform | deviceTColorCamera_ |
| CameraModel | model_ |
| glm::mat4 | projectionMatrix_ |
| GLuint | textureId_ |
| float | transformed_uvs_ [8] |
| bool | uvs_initialized_ = false |
| glm::mat4 | viewMatrix_ |
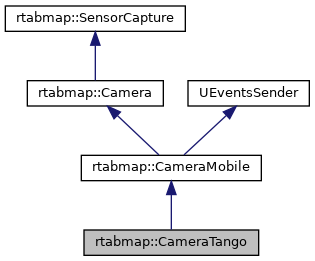
Detailed Description
Definition at line 46 of file CameraTango.h.
Constructor & Destructor Documentation
◆ CameraTango()
| rtabmap::CameraTango::CameraTango | ( | bool | colorCamera, |
| int | decimation, | ||
| bool | publishRawScan, | ||
| bool | smoothing | ||
| ) |
Definition at line 117 of file CameraTango.cpp.
◆ ~CameraTango()
|
virtual |
Definition at line 129 of file CameraTango.cpp.
Member Function Documentation
◆ close()
|
virtual |
Reimplemented from rtabmap::CameraMobile.
Definition at line 426 of file CameraTango.cpp.
◆ cloudReceived()
| void rtabmap::CameraTango::cloudReceived | ( | const cv::Mat & | cloud, |
| double | timestamp | ||
| ) |
Definition at line 442 of file CameraTango.cpp.
◆ getPoseAtTimestamp()
|
private |
Definition at line 743 of file CameraTango.cpp.
◆ getSerial()
|
virtual |
Reimplemented from rtabmap::CameraMobile.
Definition at line 721 of file CameraTango.cpp.
◆ init()
|
virtual |
Reimplemented from rtabmap::CameraMobile.
Definition at line 193 of file CameraTango.cpp.
◆ rgbReceived()
Definition at line 702 of file CameraTango.cpp.
◆ setDecimation()
|
inline |
Definition at line 55 of file CameraTango.h.
◆ setRawScanPublished()
|
inline |
Definition at line 56 of file CameraTango.h.
◆ tangoEventReceived()
| void rtabmap::CameraTango::tangoEventReceived | ( | int | type, |
| const char * | key, | ||
| const char * | value | ||
| ) |
Definition at line 716 of file CameraTango.cpp.
◆ tangoPoseToTransform()
| rtabmap::Transform rtabmap::CameraTango::tangoPoseToTransform | ( | const TangoPoseData * | tangoPose | ) | const |
Definition at line 726 of file CameraTango.cpp.
◆ updateDataOnRender()
|
protectedvirtual |
Reimplemented from rtabmap::CameraMobile.
Definition at line 774 of file CameraTango.cpp.
Member Data Documentation
◆ colorCamera_
|
private |
Definition at line 70 of file CameraTango.h.
◆ decimation_
|
private |
Definition at line 71 of file CameraTango.h.
◆ fisheyeRectifyMapX_
|
private |
Definition at line 79 of file CameraTango.h.
◆ fisheyeRectifyMapY_
|
private |
Definition at line 80 of file CameraTango.h.
◆ rawScanPublished_
|
private |
Definition at line 72 of file CameraTango.h.
◆ tango_config_
|
private |
Definition at line 69 of file CameraTango.h.
◆ tangoColor_
|
private |
Definition at line 74 of file CameraTango.h.
◆ tangoColorStamp_
|
private |
Definition at line 76 of file CameraTango.h.
◆ tangoColorType_
|
private |
Definition at line 75 of file CameraTango.h.
◆ tangoData_
|
private |
Definition at line 73 of file CameraTango.h.
◆ tangoDataMutex_
|
private |
Definition at line 77 of file CameraTango.h.
◆ tangoDataReady_
|
private |
Definition at line 78 of file CameraTango.h.
The documentation for this class was generated from the following files: