#include <transmission_interface_loader.h>
Classes | |
| struct | TransmissionHandleData |
Public Member Functions | |
| bool | loadTransmissionMaps (const TransmissionInfo &transmission_info, TransmissionLoaderData &loader_data, TransmissionSharedPtr transmission) |
| virtual bool | updateJointInterfaces (const TransmissionInfo &transmission_info, hardware_interface::RobotHW *robot_hw, JointInterfaces &joint_interfaces, RawJointDataMap &raw_joint_data_map)=0 |
| Update a robot's joint interfaces with joint information contained in a transmission. More... | |
| virtual | ~RequisiteProvider ()=default |
Protected Member Functions | |
| virtual bool | getActuatorCommandData (const TransmissionInfo &transmission_info, hardware_interface::RobotHW *robot_hw, ActuatorData &act_cmd_data)=0 |
| template<class HardwareInterface , class Handle > | |
| bool | getActuatorHandles (const std::vector< ActuatorInfo > &actuators_info, hardware_interface::RobotHW *robot_hw, std::vector< Handle > &handles) |
| virtual bool | getActuatorStateData (const TransmissionInfo &transmission_info, hardware_interface::RobotHW *robot_hw, ActuatorData &act_state_data)=0 |
| virtual bool | getJointCommandData (const TransmissionInfo &transmission_info, const RawJointDataMap &raw_joint_data_map, JointData &jnt_cmd_data)=0 |
| virtual bool | getJointStateData (const TransmissionInfo &transmission_info, const RawJointDataMap &raw_joint_data_map, JointData &jnt_state_data)=0 |
| virtual bool | registerTransmission (TransmissionLoaderData &loader_data, TransmissionHandleData &handle_data)=0 |
Static Protected Member Functions | |
| template<class Interface > | |
| static bool | hasResource (const std::string &name, const Interface &iface) |
Detailed Description
Definition at line 128 of file transmission_interface_loader.h.
Constructor & Destructor Documentation
◆ ~RequisiteProvider()
|
virtualdefault |
Member Function Documentation
◆ getActuatorCommandData()
|
protectedpure virtual |
◆ getActuatorHandles()
|
inlineprotected |
Definition at line 207 of file transmission_interface_loader.h.
◆ getActuatorStateData()
|
protectedpure virtual |
Implemented in transmission_interface::JointStateInterfaceProvider.
◆ getJointCommandData()
|
protectedpure virtual |
◆ getJointStateData()
|
protectedpure virtual |
Implemented in transmission_interface::JointStateInterfaceProvider.
◆ hasResource()
|
inlinestaticprotected |
Definition at line 186 of file transmission_interface_loader.h.
◆ loadTransmissionMaps()
| bool transmission_interface::RequisiteProvider::loadTransmissionMaps | ( | const TransmissionInfo & | transmission_info, |
| TransmissionLoaderData & | loader_data, | ||
| TransmissionSharedPtr | transmission | ||
| ) |
Definition at line 40 of file transmission_interface_loader.cpp.
◆ registerTransmission()
|
protectedpure virtual |
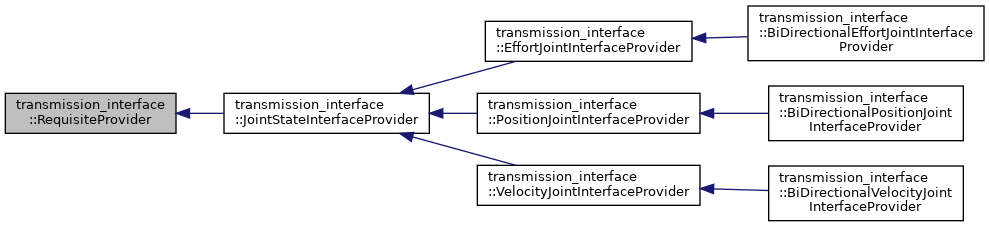
Implemented in transmission_interface::JointStateInterfaceProvider, transmission_interface::EffortJointInterfaceProvider, transmission_interface::PositionJointInterfaceProvider, transmission_interface::VelocityJointInterfaceProvider, transmission_interface::BiDirectionalEffortJointInterfaceProvider, transmission_interface::BiDirectionalPositionJointInterfaceProvider, and transmission_interface::BiDirectionalVelocityJointInterfaceProvider.
◆ updateJointInterfaces()
|
pure virtual |
Update a robot's joint interfaces with joint information contained in a transmission.
- Parameters
-
[in] transmission_info Structure containing information of which joints to add. Only new, non-previously registered joints will be added. [out] joint_ifaces Joint interfaces where new joints will be added. It may already contain data, which will not be overwritten; only new joints will be added. raw_joint_data_map[out] Structure where the raw data of new joints will reside. It may already contain data, which will not be overwritten; only new data will be added.
- Returns
- true if successful.
Implemented in transmission_interface::EffortJointInterfaceProvider, transmission_interface::PositionJointInterfaceProvider, transmission_interface::VelocityJointInterfaceProvider, and transmission_interface::JointStateInterfaceProvider.
The documentation for this class was generated from the following files: