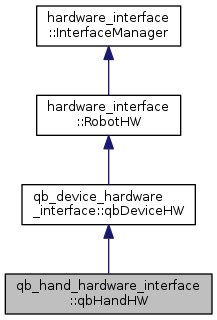
The qbrobotics qbhand HardWare interface implements the specific structures to manage the communication with the qbhand device. More...
#include <qb_hand_hardware_interface.h>
Public Member Functions | |
| std::vector< std::string > | getJoints () override |
| bool | init (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) override |
| Call the base method and nothing more. More... | |
| qbHandHW () | |
Initialize the qb_device_hardware_interface::qbDeviceHW with the specific transmission interface and actuator and joint names. More... | |
| void | read (const ros::Time &time, const ros::Duration &period) override |
| Call the base method and nothing more. More... | |
| void | write (const ros::Time &time, const ros::Duration &period) override |
| Call the base method and nothing more. More... | |
| ~qbHandHW () override | |
| Do nothing. More... | |
 Public Member Functions inherited from qb_device_hardware_interface::qbDeviceHW Public Member Functions inherited from qb_device_hardware_interface::qbDeviceHW | |
| int | getDeviceId () |
| std::string | getDeviceNamespace () |
| qbDeviceHW (qb_device_transmission_interface::TransmissionPtr transmission, const std::vector< std::string > &actuators, const std::vector< std::string > &joints) | |
| virtual | ~qbDeviceHW () |
| Public Member Functions inherited from hardware_interface::RobotHW | |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| RobotHW () | |
| virtual | ~RobotHW () |
| Public Member Functions inherited from hardware_interface::InterfaceManager | |
| T * | get () |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| std::vector< std::string > | getNames () const |
| void | registerInterface (T *iface) |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
Detailed Description
The qbrobotics qbhand HardWare interface implements the specific structures to manage the communication with the qbhand device.
It exploits the features provided by the base device-independent hardware interface and the specific transmission interface.
- See also
- qb_device_hardware_interface::qbDeviceHW, qb_hand_transmission_interface::qbHandVirtualTransmission
Definition at line 45 of file qb_hand_hardware_interface.h.
Constructor & Destructor Documentation
| qbHandHW::qbHandHW | ( | ) |
Initialize the qb_device_hardware_interface::qbDeviceHW with the specific transmission interface and actuator and joint names.
Definition at line 32 of file qb_hand_hardware_interface.cpp.
|
override |
Do nothing.
Definition at line 37 of file qb_hand_hardware_interface.cpp.
Member Function Documentation
|
overridevirtual |
- Returns
- The vector of controller joint names.
Implements qb_device_hardware_interface::qbDeviceHW.
Definition at line 41 of file qb_hand_hardware_interface.cpp.
|
overridevirtual |
Call the base method and nothing more.
- Parameters
-
root_nh A NodeHandle in the root of the caller namespace. robot_hw_nh A NodeHandle in the namespace from which the RobotHW should read its configuration.
- Returns
trueon success.
Reimplemented from qb_device_hardware_interface::qbDeviceHW.
Definition at line 45 of file qb_hand_hardware_interface.cpp.
|
overridevirtual |
Call the base method and nothing more.
- Parameters
-
time The current time. period The time passed since the last call to this method, i.e. the control period.
Reimplemented from qb_device_hardware_interface::qbDeviceHW.
Definition at line 55 of file qb_hand_hardware_interface.cpp.
|
overridevirtual |
Call the base method and nothing more.
- Parameters
-
time The current time. period The time passed since the last call to this method, i.e. the control period.
Reimplemented from qb_device_hardware_interface::qbDeviceHW.
Definition at line 60 of file qb_hand_hardware_interface.cpp.
The documentation for this class was generated from the following files: