#include <single_state_hypothesis_laser_scan_grid_world.h>
Public Types | |
| using | MapType = typename LaserScanGridWorld< MapT >::MapType |
| using | Properties = SingleStateHypothesisLSGWProperties |
 Public Types inherited from LaserScanGridWorld< MapT > Public Types inherited from LaserScanGridWorld< MapT > | |
| using | MapType = typename World< TransformedLaserScan, MapT >::MapType |
| using | ScanType = TransformedLaserScan |
| Public Types inherited from World< TransformedLaserScan, MapT > | |
| using | MapType = MapT |
Public Member Functions | |
| void | add_sm_observer (std::shared_ptr< GridScanMatcherObserver > obs) |
| virtual void | handle_observation (TransformedLaserScan &tr_scan) |
| const MapType & | map () const override |
| void | remove_sm_observer (std::shared_ptr< GridScanMatcherObserver > obs) |
| auto | scan_adder () |
| auto | scan_matcher () |
| SingleStateHypothesisLaserScanGridWorld (const Properties &props) | |
| Public Member Functions inherited from LaserScanGridWorld< MapT > | |
| void | handle_sensor_data (ScanType &scan) override |
| Public Member Functions inherited from World< TransformedLaserScan, MapT > | |
| MapType & | map () |
| virtual const RobotPose & | pose () const |
| virtual void | update_robot_pose (const RobotPoseDelta &delta) |
| virtual const World< TransformedLaserScan, MapType > & | world () const |
| Public Member Functions inherited from WorldObservable< MapT > | |
| void | subscribe_map (std::shared_ptr< WorldMapObserver< MapT >> obs) |
| void | subscribe_pose (std::shared_ptr< WorldPoseObserver > obs) |
Protected Attributes | |
| MapType | _map |
| Properties | _props |
Additional Inherited Members | |
| Protected Member Functions inherited from World< TransformedLaserScan, MapT > | |
| virtual | ~World ()=default |
| Protected Member Functions inherited from WorldObservable< MapT > | |
| void | notify_with_map (const MapT &map) |
| void | notify_with_pose (const RobotPose &pose) |
Detailed Description
template<typename MapT>
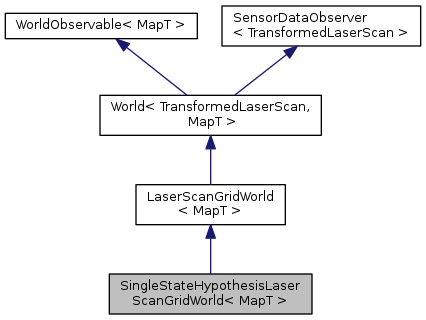
class SingleStateHypothesisLaserScanGridWorld< MapT >
Definition at line 43 of file single_state_hypothesis_laser_scan_grid_world.h.
Member Typedef Documentation
| using SingleStateHypothesisLaserScanGridWorld< MapT >::MapType = typename LaserScanGridWorld<MapT>::MapType |
Definition at line 46 of file single_state_hypothesis_laser_scan_grid_world.h.
| using SingleStateHypothesisLaserScanGridWorld< MapT >::Properties = SingleStateHypothesisLSGWProperties |
Definition at line 47 of file single_state_hypothesis_laser_scan_grid_world.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 49 of file single_state_hypothesis_laser_scan_grid_world.h.
Member Function Documentation
|
inline |
Definition at line 56 of file single_state_hypothesis_laser_scan_grid_world.h.
|
inlinevirtual |
Implements LaserScanGridWorld< MapT >.
Reimplemented in GmappingWorld.
Definition at line 74 of file single_state_hypothesis_laser_scan_grid_world.h.
|
inlineoverridevirtual |
Implements World< TransformedLaserScan, MapT >.
Definition at line 70 of file single_state_hypothesis_laser_scan_grid_world.h.
|
inline |
Definition at line 61 of file single_state_hypothesis_laser_scan_grid_world.h.
|
inline |
Definition at line 67 of file single_state_hypothesis_laser_scan_grid_world.h.
|
inline |
Definition at line 54 of file single_state_hypothesis_laser_scan_grid_world.h.
Member Data Documentation
|
protected |
Definition at line 91 of file single_state_hypothesis_laser_scan_grid_world.h.
|
protected |
Definition at line 90 of file single_state_hypothesis_laser_scan_grid_world.h.
The documentation for this class was generated from the following file: