#include <world.h>
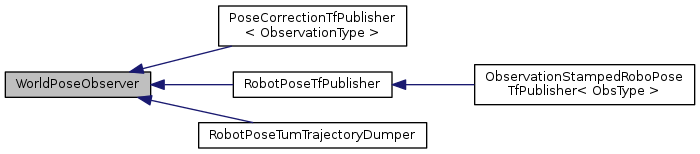
Inheritance diagram for WorldPoseObserver:
Public Member Functions | |
| virtual void | on_pose_update (const RobotPose &rs)=0 |
Detailed Description
Member Function Documentation
|
pure virtual |
Implemented in RobotPoseTumTrajectoryDumper, PoseCorrectionTfPublisher< ObservationType >, and RobotPoseTfPublisher.
The documentation for this class was generated from the following file: