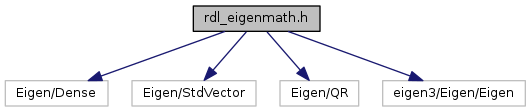
#include <Eigen/Dense>#include <Eigen/StdVector>#include <Eigen/QR>#include <eigen3/Eigen/Eigen>
Include dependency graph for rdl_eigenmath.h:
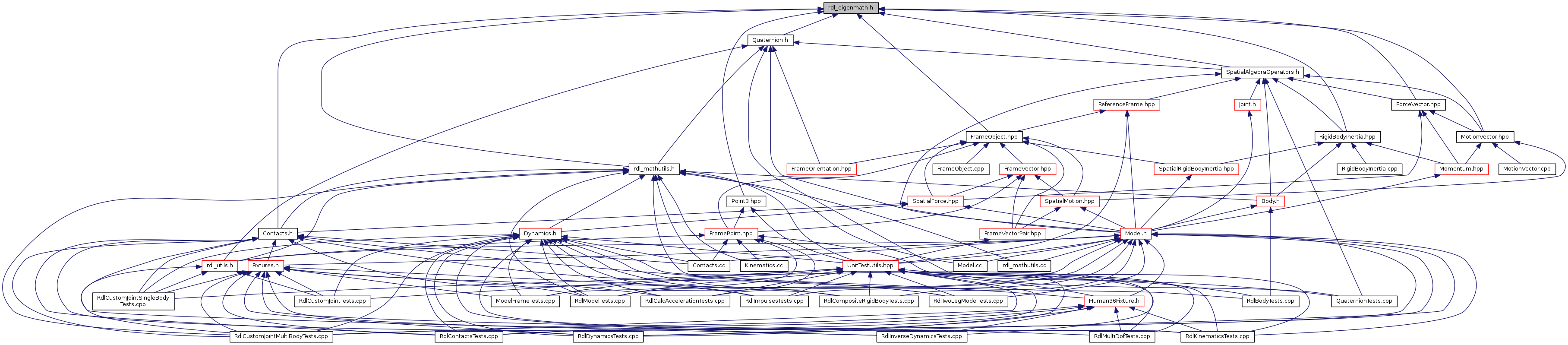
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::Matrix3d |
| class | RobotDynamics::Math::Matrix4d |
| class | RobotDynamics::Math::SpatialMatrix |
| struct | RobotDynamics::Math::SpatialTransform |
| Compact representation of spatial transformations. More... | |
| class | RobotDynamics::Math::SpatialVector |
| class | RobotDynamics::Math::TransformableGeometricObject |
| The TransformableGeometricObject class is an essential interface because it forces all geometric objects to implement a method that tells how to transform them. This makes in possible for frame transformations of any TransformableGeometricObject can be done via the FrameObject::changeFrame method. More... | |
| class | RobotDynamics::Math::Vector3d |
| class | RobotDynamics::Math::Vector4d |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |
Typedefs | |
| typedef Eigen::AngleAxisd | RobotDynamics::Math::AxisAngle |
| typedef Eigen::Matrix< double, 6, 3 > | RobotDynamics::Math::Matrix63 |
| typedef Eigen::MatrixXd | RobotDynamics::Math::MatrixNd |
| typedef Eigen::VectorXd | RobotDynamics::Math::VectorNd |