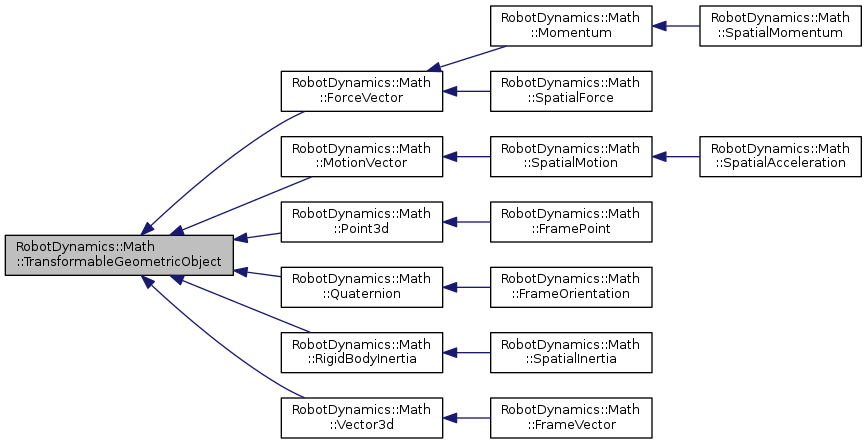
The TransformableGeometricObject class is an essential interface because it forces all geometric objects to implement a method that tells how to transform them. This makes in possible for frame transformations of any TransformableGeometricObject can be done via the FrameObject::changeFrame method. More...
#include <rdl_eigenmath.h>
Public Member Functions | |
| virtual void | transform (const RobotDynamics::Math::SpatialTransform &X)=0 |
| Pure virtual object. This object forces objects that inherit from it to have a method that tells how that object is transformed. More... | |
Detailed Description
The TransformableGeometricObject class is an essential interface because it forces all geometric objects to implement a method that tells how to transform them. This makes in possible for frame transformations of any TransformableGeometricObject can be done via the FrameObject::changeFrame method.
Definition at line 43 of file rdl_eigenmath.h.
Member Function Documentation
|
pure virtual |
Pure virtual object. This object forces objects that inherit from it to have a method that tells how that object is transformed.
- Parameters
-
X SpatialTransform
Implemented in RobotDynamics::Math::Quaternion, RobotDynamics::Math::ForceVector, RobotDynamics::Math::MotionVector, RobotDynamics::Math::RigidBodyInertia, RobotDynamics::Math::Vector3d, and RobotDynamics::Math::Point3d.
The documentation for this class was generated from the following file: