An interface that objects with a ReferenceFrame extend to inherit the FrameObject::changeFrame method. More...
#include <FrameObject.hpp>
Public Member Functions | |
| virtual void | changeFrame (ReferenceFramePtr desiredFrame) |
| Change the ReferenceFrame this FrameObject is expressed in. More... | |
| void | checkReferenceFramesMatch (const FrameObject *frameObject) const |
| Check if two ReferenceFrameHolders hold the same ReferenceFrame. More... | |
| void | checkReferenceFramesMatch (FrameObject *frameObject) const |
| FrameObject (ReferenceFramePtr referenceFrame) | |
| ReferenceFramePtr | getReferenceFrame () const |
| Get a pointer to the reference frame this FrameObject is expressed in. More... | |
| void | setReferenceFrame (ReferenceFramePtr frame) |
| Set frame objects internal reference frame. More... | |
| virtual | ~FrameObject () |
| Destructor. More... | |
Protected Member Functions | |
| virtual Math::TransformableGeometricObject * | getTransformableGeometricObject ()=0 |
| Pure virtual method that FrameObjects are required to implement so the FrameObject::changeFrame method is able to access the TransformableGeometricObject which is required to implement the TransformableGeometricObject::transform method. More... | |
Protected Attributes | |
| ReferenceFramePtr | referenceFrame |
Detailed Description
An interface that objects with a ReferenceFrame extend to inherit the FrameObject::changeFrame method.
Definition at line 28 of file FrameObject.hpp.
Constructor & Destructor Documentation
|
inlineexplicit |
Definition at line 31 of file FrameObject.hpp.
|
inlinevirtual |
Destructor.
Definition at line 38 of file FrameObject.hpp.
Member Function Documentation
|
virtual |
Change the ReferenceFrame this FrameObject is expressed in.
- Parameters
-
desiredFrame A pointer to the ReferenceFrame this FrameObject is to be transformed to
Definition at line 12 of file FrameObject.cpp.
|
inline |
Check if two ReferenceFrameHolders hold the same ReferenceFrame.
- Parameters
-
referenceFrameHolder
Definition at line 70 of file FrameObject.hpp.
|
inline |
Definition at line 75 of file FrameObject.hpp.
|
inline |
Get a pointer to the reference frame this FrameObject is expressed in.
- Returns
- Pointer to the ReferenceFrame this FrameObject is expressed in
Definition at line 52 of file FrameObject.hpp.
|
protectedpure virtual |
Pure virtual method that FrameObjects are required to implement so the FrameObject::changeFrame method is able to access the TransformableGeometricObject which is required to implement the TransformableGeometricObject::transform method.
- Returns
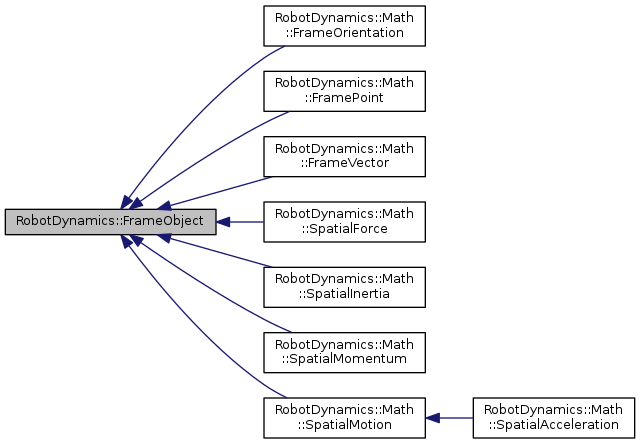
Implemented in RobotDynamics::Math::SpatialMomentum, RobotDynamics::Math::SpatialMotion, RobotDynamics::Math::FramePoint, RobotDynamics::Math::SpatialInertia, RobotDynamics::Math::FrameVector, RobotDynamics::Math::SpatialForce, and RobotDynamics::Math::FrameOrientation.
|
inline |
Set frame objects internal reference frame.
- Parameters
-
frame Pointer to new frame
Definition at line 61 of file FrameObject.hpp.
Member Data Documentation
|
protected |
< Pointer to a ReferenceFrame
Definition at line 81 of file FrameObject.hpp.
The documentation for this class was generated from the following files: