#include <cmath>#include "unit-tests-common.h"#include "../include/librealsense2/rs_advanced_mode.hpp"#include <librealsense2/hpp/rs_types.hpp>#include <librealsense2/hpp/rs_frame.hpp>#include <iostream>#include <chrono>#include <ctime>#include <algorithm>#include <librealsense2/rsutil.h>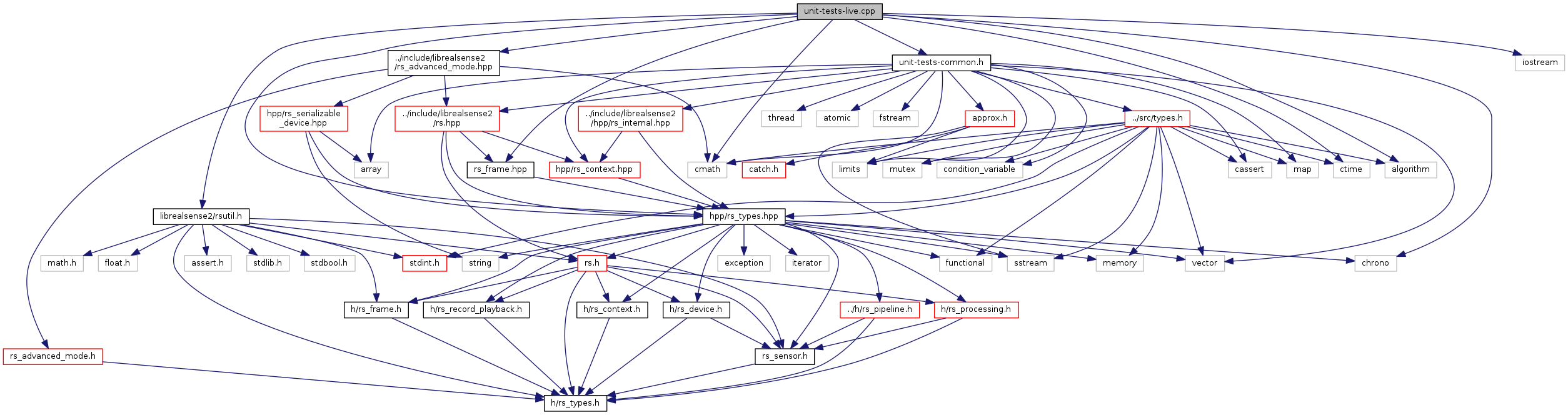
Go to the source code of this file.
Classes | |
| struct | option_bundle |
| struct | stream_format |
Macros | |
| #define | ADD_ENUM_TEST_CASE(rs2_enum_type, RS2_ENUM_COUNT) |
Enumerations | |
| enum | dev_group { e_unresolved_grp, e_d400, e_sr300 } |
Functions | |
| void | check_controls_sanity (const context &ctx, const sensor &dev) |
| std::shared_ptr< std::function< void(rs2::frame fref)> > | check_stream_sanity (const context &ctx, const sensor &sub, int num_of_frames, bool infinite=false) |
| void | compare (filter first, filter second) |
| void | compare (std::vector< filter > first, std::vector< std::shared_ptr< filter >> second) |
| void | dev_changed (rs2_device_list *removed_devs, rs2_device_list *added_devs, void *ptr) |
| bool | get_mode (rs2::device &dev, stream_profile *profile, int mode_index=0) |
| std::vector< rs2::stream_profile > | get_supported_streams (rs2::sensor sensor, std::vector< rs2::stream_profile > profiles) |
| bool | is_fw_version_newer (rs2::sensor &subdevice, const uint32_t other_fw[4]) |
| std::pair< std::shared_ptr< rs2::device >, std::weak_ptr< rs2::device > > | make_device (device_list &list) |
| void | metadata_verification (const std::vector< internal_frame_additional_data > &data) |
| bool | operator== (std::vector< profile > streams1, std::vector< profile > streams2) |
| void | require_pipeline_profile_same (const rs2::pipeline_profile &profile1, const rs2::pipeline_profile &profile2) |
| void | reset_device (std::shared_ptr< rs2::device > &strong, std::weak_ptr< rs2::device > &weak, device_list &list, const rs2::device &new_dev) |
| std::vector< uint32_t > | split (const std::string &s, char delim) |
| TEST_CASE ("Sync sanity","[live][mayfail]") | |
| TEST_CASE ("Sync different fps","[live][mayfail]") | |
| TEST_CASE ("Sync start stop","[live][mayfail]") | |
| TEST_CASE ("Device metadata enumerates correctly","[live]") | |
| TEST_CASE ("Start-Stop stream sequence","[live][using_pipeline]") | |
| TEST_CASE ("Start-Stop streaming - Sensors callbacks API","[live][using_callbacks]") | |
| TEST_CASE ("No extrinsic transformation between a stream and itself","[live]") | |
| TEST_CASE ("Extrinsic transformation between two streams is a rigid transform","[live]") | |
| TEST_CASE ("Extrinsic transformations are transitive","[live]") | |
| TEST_CASE ("Toggle Advanced Mode","[live][AdvMd][mayfail]") | |
| TEST_CASE ("Advanced Mode presets","[live][AdvMd][mayfail]") | |
| TEST_CASE ("Advanced Mode JSON","[live][AdvMd][mayfail]") | |
| TEST_CASE ("Advanced Mode controls","[live][AdvMd][mayfail]") | |
| TEST_CASE ("Streaming modes sanity check","[live][mayfail]") | |
| TEST_CASE ("Motion profiles sanity","[live]") | |
| TEST_CASE ("Check width and height of stream intrinsics","[live][AdvMd]") | |
| TEST_CASE ("get_active_streams sanity check","[live]") | |
| TEST_CASE ("Check option API","[live][options]") | |
| TEST_CASE ("Auto-Disabling Controls","[live][options]") | |
| TEST_CASE ("Multiple devices","[live][multicam][!mayfail]") | |
| TEST_CASE ("Multiple applications","[live][multicam][!mayfail]") | |
| TEST_CASE ("Error handling sanity","[live][!mayfail]") | |
| TEST_CASE ("Auto disabling control behavior","[live]") | |
| TEST_CASE ("Disconnect events works","[live]") | |
| TEST_CASE ("Connect events works","[live]") | |
| TEST_CASE ("Connect Disconnect events while streaming","[live]") | |
| TEST_CASE ("Connect Disconnect events while controls","[live]") | |
| TEST_CASE ("Basic device_hub flow","[live][!mayfail]") | |
| TEST_CASE ("Auto-complete feature works","[offline][util::config][using_pipeline]") | |
| TEST_CASE ("Pipeline wait_for_frames","[live][pipeline][using_pipeline][!mayfail]") | |
| TEST_CASE ("Pipeline poll_for_frames","[live][pipeline][using_pipeline][!mayfail]") | |
| TEST_CASE ("Pipeline enable stream","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline enable stream auto complete","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline disable_all","[live][pipeline][using_pipeline][!mayfail]") | |
| TEST_CASE ("Pipeline disable stream","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline with specific device","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline start stop","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline get selection","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Per-frame metadata sanity check","[live][!mayfail]") | |
| TEST_CASE ("color sensor API","[live][options]") | |
| TEST_CASE ("motion sensor API","[live][options]") | |
| TEST_CASE ("fisheye sensor API","[live][options]") | |
| TEST_CASE ("Alternating Emitter","[live][options]") | |
| TEST_CASE ("All suggested profiles can be opened","[live][!mayfail]") | |
| TEST_CASE ("Pipeline config enable resolve start flow","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline - multicam scenario with specific devices","[live][multicam][pipeline][using_pipeline]") | |
| TEST_CASE ("Empty Pipeline Profile","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline empty Config","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline 2 Configs","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline start after resolve uses the same profile","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline start ignores previous config if it was changed","[live][pipeline][using_pipeline][!mayfail]") | |
| TEST_CASE ("Pipeline Config disable all is a nop with empty config","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline Config disable each stream is nop on empty config","[live][pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline enable bad configuration","[pipeline][using_pipeline]") | |
| TEST_CASE ("Pipeline stream enable hierarchy","[pipeline]") | |
| TEST_CASE ("Pipeline stream with callback","[live][pipeline][using_pipeline][!mayfail]") | |
| TEST_CASE ("Syncer sanity with software-device device","[live][software-device][!mayfail]") | |
| TEST_CASE ("Syncer clean_inactive_streams by frame number with software-device device","[live][software-device]") | |
| TEST_CASE ("Unit transform test","[live][software-device]") | |
| TEST_CASE ("C API Compilation","[live]") | |
| TEST_CASE ("Syncer try wait for frames","[live][software-device]") | |
| TEST_CASE ("Test Motion Module Extension","[software-device][using_pipeline][projection]") | |
| TEST_CASE ("Projection from recording","[software-device][using_pipeline][projection][!mayfail]") | |
| TEST_CASE ("software-device pose stream","[software-device]") | |
| TEST_CASE ("software-device motion stream","[software-device]") | |
| TEST_CASE ("Record software-device","[software-device][record][!mayfail]") | |
| TEST_CASE ("Sensor get recommended filters","[live][!mayfail]") | |
| TEST_CASE ("L500 zero order sanity","[live]") | |
| TEST_CASE ("Positional_Sensors_API","[live]") | |
| TEST_CASE ("Wheel_Odometry_API","[live]") | |
| TEST_CASE ("get_sensor_from_frame","[live][using_pipeline][!mayfail]") | |
| TEST_CASE ("l500_presets_set_preset","[live]") | |
| void | trigger_error (const rs2::device &dev, int num) |
| void | validate (std::vector< std::vector< stream_profile >> frames, std::vector< std::vector< double >> timestamps, device_profiles requests, int actual_fps) |
Variables | |
| const std::map< dev_group, std::vector< option_bundle > > | auto_disabling_controls |
| const std::map< dev_type, dev_group > | dev_map |
| static const std::map< dev_type, device_profiles > | pipeline_autocomplete_configurations |
| static const std::map< dev_type, device_profiles > | pipeline_configurations_for_extrinsic |
| static const std::map< dev_type, device_profiles > | pipeline_custom_configurations |
| static const std::map< dev_type, device_profiles > | pipeline_default_configurations |
Macro Definition Documentation
| #define ADD_ENUM_TEST_CASE | ( | rs2_enum_type, | |
| RS2_ENUM_COUNT | |||
| ) |
Definition at line 4991 of file unit-tests-live.cpp.
Enumeration Type Documentation
| enum dev_group |
| Enumerator | |
|---|---|
| e_unresolved_grp | |
| e_d400 | |
| e_sr300 | |
Definition at line 1510 of file unit-tests-live.cpp.
Function Documentation
Definition at line 2523 of file unit-tests-live.cpp.
| std::shared_ptr<std::function<void(rs2::frame fref)> > check_stream_sanity | ( | const context & | ctx, |
| const sensor & | sub, | ||
| int | num_of_frames, | ||
| bool | infinite = false |
||
| ) |
Definition at line 2378 of file unit-tests-live.cpp.
Definition at line 5390 of file unit-tests-live.cpp.
Definition at line 5413 of file unit-tests-live.cpp.
| void dev_changed | ( | rs2_device_list * | removed_devs, |
| rs2_device_list * | added_devs, | ||
| void * | ptr | ||
| ) |
Definition at line 5032 of file unit-tests-live.cpp.
| bool get_mode | ( | rs2::device & | dev, |
| stream_profile * | profile, | ||
| int | mode_index = 0 |
||
| ) |
Definition at line 236 of file unit-tests-live.cpp.
| std::vector<rs2::stream_profile> get_supported_streams | ( | rs2::sensor | sensor, |
| std::vector< rs2::stream_profile > | profiles | ||
| ) |
Definition at line 1304 of file unit-tests-live.cpp.
| bool is_fw_version_newer | ( | rs2::sensor & | subdevice, |
| const uint32_t | other_fw[4] | ||
| ) |
Definition at line 2122 of file unit-tests-live.cpp.
| std::pair<std::shared_ptr<rs2::device>, std::weak_ptr<rs2::device> > make_device | ( | device_list & | list | ) |
Definition at line 2213 of file unit-tests-live.cpp.
| void metadata_verification | ( | const std::vector< internal_frame_additional_data > & | data | ) |
- Apply heuristic test to check metadata attributes for sanity*/
Definition at line 1974 of file unit-tests-live.cpp.
Definition at line 3467 of file unit-tests-live.cpp.
| void require_pipeline_profile_same | ( | const rs2::pipeline_profile & | profile1, |
| const rs2::pipeline_profile & | profile2 | ||
| ) |
Definition at line 4419 of file unit-tests-live.cpp.
| void reset_device | ( | std::shared_ptr< rs2::device > & | strong, |
| std::weak_ptr< rs2::device > & | weak, | ||
| device_list & | list, | ||
| const rs2::device & | new_dev | ||
| ) |
Definition at line 2226 of file unit-tests-live.cpp.
| std::vector<uint32_t> split | ( | const std::string & | s, |
| char | delim | ||
| ) |
Definition at line 2112 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Sync sanity" | , |
| "" | [live][mayfail] | ||
| ) |
Definition at line 21 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Sync different fps" | , |
| "" | [live][mayfail] | ||
| ) |
Definition at line 116 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Sync start stop" | , |
| "" | [live][mayfail] | ||
| ) |
Definition at line 255 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Device metadata enumerates correctly" | , |
| "" | [live] | ||
| ) |
Definition at line 347 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Start-Stop stream sequence" | , |
| "" | [live][using_pipeline] | ||
| ) |
Definition at line 375 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Start-Stop streaming - Sensors callbacks API" | , |
| "" | [live][using_callbacks] | ||
| ) |
Definition at line 407 of file unit-tests-live.cpp.
| TEST_CASE | ( | "No extrinsic transformation between a stream and itself" | , |
| "" | [live] | ||
| ) |
Definition at line 532 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Extrinsic transformation between two streams is a rigid transform" | , |
| "" | [live] | ||
| ) |
Definition at line 567 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Extrinsic transformations are transitive" | , |
| "" | [live] | ||
| ) |
Definition at line 626 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Toggle Advanced Mode" | , |
| "" | [live][AdvMd][mayfail] | ||
| ) |
Definition at line 695 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Advanced Mode presets" | , |
| "" | [live][AdvMd][mayfail] | ||
| ) |
Definition at line 740 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Advanced Mode JSON" | , |
| "" | [live][AdvMd][mayfail] | ||
| ) |
Definition at line 830 of file unit-tests-live.cpp.
Definition at line 893 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Streaming modes sanity check" | , |
| "" | [live][mayfail] | ||
| ) |
Definition at line 1081 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Motion profiles sanity" | , |
| "" | [live] | ||
| ) |
Definition at line 1169 of file unit-tests-live.cpp.
Definition at line 1225 of file unit-tests-live.cpp.
| TEST_CASE | ( | "get_active_streams sanity check" | , |
| "" | [live] | ||
| ) |
Definition at line 1326 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Check option API" | , |
| "" | [live][options] | ||
| ) |
Definition at line 1366 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Auto-Disabling Controls" | , |
| "" | [live][options] | ||
| ) |
Definition at line 1543 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Multiple devices" | , |
| "" | [live][multicam][!mayfail] | ||
| ) |
The test may fail due to changes in profiles list that do not indicate regression. TODO - refactoring required to make the test agnostic to changes imposed by librealsense core
Definition at line 1627 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Multiple applications" | , |
| "" | [live][multicam][!mayfail] | ||
| ) |
Definition at line 1793 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Error handling sanity" | , |
| "" | [live][!mayfail] | ||
| ) |
Definition at line 2050 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Auto disabling control behavior" | , |
| "" | [live] | ||
| ) |
Definition at line 2141 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Disconnect events works" | , |
| "" | [live] | ||
| ) |
Definition at line 2236 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Connect events works" | , |
| "" | [live] | ||
| ) |
Definition at line 2309 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Connect Disconnect events while streaming" | , |
| "" | [live] | ||
| ) |
Definition at line 2442 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Connect Disconnect events while controls" | , |
| "" | [live] | ||
| ) |
Definition at line 2535 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Basic device_hub flow" | , |
| "" | [live][!mayfail] | ||
| ) |
Definition at line 2606 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Auto-complete feature works" | , |
| "" | [offline][util::config][using_pipeline] | ||
| ) |
Definition at line 2652 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline wait_for_frames" | , |
| "" | [live][pipeline][using_pipeline][!mayfail] | ||
| ) |
Definition at line 2937 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline poll_for_frames" | , |
| "" | [live][pipeline][using_pipeline][!mayfail] | ||
| ) |
Definition at line 3003 of file unit-tests-live.cpp.
Definition at line 3096 of file unit-tests-live.cpp.
Definition at line 3193 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline disable_all" | , |
| "" | [live][pipeline][using_pipeline][!mayfail] | ||
| ) |
Definition at line 3268 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline disable stream" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 3346 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline with specific device" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 3425 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline start stop" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 3487 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline get selection" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 3609 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Per-frame metadata sanity check" | , |
| "" | [live][!mayfail] | ||
| ) |
Definition at line 3670 of file unit-tests-live.cpp.
| TEST_CASE | ( | "color sensor API" | , |
| "" | [live][options] | ||
| ) |
Definition at line 3845 of file unit-tests-live.cpp.
| TEST_CASE | ( | "motion sensor API" | , |
| "" | [live][options] | ||
| ) |
Definition at line 3886 of file unit-tests-live.cpp.
| TEST_CASE | ( | "fisheye sensor API" | , |
| "" | [live][options] | ||
| ) |
Definition at line 3919 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Alternating Emitter" | , |
| "" | [live][options] | ||
| ) |
Definition at line 3952 of file unit-tests-live.cpp.
| TEST_CASE | ( | "All suggested profiles can be opened" | , |
| "" | [live][!mayfail] | ||
| ) |
Definition at line 4168 of file unit-tests-live.cpp.
Definition at line 4204 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline - multicam scenario with specific devices" | , |
| "" | [live][multicam][pipeline][using_pipeline] | ||
| ) |
Definition at line 4272 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Empty Pipeline Profile" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 4394 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline empty Config" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 4472 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline 2 Configs" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 4492 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline start after resolve uses the same profile" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 4518 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline start ignores previous config if it was changed" | , |
| "" | [live][pipeline][using_pipeline][!mayfail] | ||
| ) |
Definition at line 4537 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline Config disable all is a nop with empty config" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 4554 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline Config disable each stream is nop on empty config" | , |
| "" | [live][pipeline][using_pipeline] | ||
| ) |
Definition at line 4573 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline enable bad configuration" | , |
| "" | [pipeline][using_pipeline] | ||
| ) |
Definition at line 4642 of file unit-tests-live.cpp.
Definition at line 4655 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Pipeline stream with callback" | , |
| "" | [live][pipeline][using_pipeline][!mayfail] | ||
| ) |
Definition at line 4687 of file unit-tests-live.cpp.
Definition at line 4730 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Syncer clean_inactive_streams by frame number with software-device device" | , |
| "" | [live][software-device] | ||
| ) |
Definition at line 4824 of file unit-tests-live.cpp.
Definition at line 4925 of file unit-tests-live.cpp.
| TEST_CASE | ( | "C API Compilation" | , |
| "" | [live] | ||
| ) |
Definition at line 5033 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Syncer try wait for frames" | , |
| "" | [live][software-device] | ||
| ) |
Definition at line 5041 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Test Motion Module Extension" | , |
| "" | [software-device][using_pipeline][projection] | ||
| ) |
Definition at line 5123 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Projection from recording" | , |
| "" | [software-device][using_pipeline][projection][!mayfail] | ||
| ) |
Definition at line 5144 of file unit-tests-live.cpp.
Definition at line 5243 of file unit-tests-live.cpp.
Definition at line 5270 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Record software-device" | , |
| "" | [software-device][record][!mayfail] | ||
| ) |
Definition at line 5298 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Sensor get recommended filters" | , |
| "" | [live][!mayfail] | ||
| ) |
Definition at line 5423 of file unit-tests-live.cpp.
| TEST_CASE | ( | "L500 zero order sanity" | , |
| "" | [live] | ||
| ) |
Definition at line 5502 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Positional_Sensors_API" | , |
| "" | [live] | ||
| ) |
Definition at line 5562 of file unit-tests-live.cpp.
| TEST_CASE | ( | "Wheel_Odometry_API" | , |
| "" | [live] | ||
| ) |
Definition at line 5697 of file unit-tests-live.cpp.
| TEST_CASE | ( | "get_sensor_from_frame" | , |
| "" | [live][using_pipeline][!mayfail] | ||
| ) |
Definition at line 5785 of file unit-tests-live.cpp.
| TEST_CASE | ( | "l500_presets_set_preset" | , |
| "" | [live] | ||
| ) |
Definition at line 5824 of file unit-tests-live.cpp.
| void trigger_error | ( | const rs2::device & | dev, |
| int | num | ||
| ) |
Definition at line 2036 of file unit-tests-live.cpp.
| void validate | ( | std::vector< std::vector< stream_profile >> | frames, |
| std::vector< std::vector< double >> | timestamps, | ||
| device_profiles | requests, | ||
| int | actual_fps | ||
| ) |
Definition at line 2814 of file unit-tests-live.cpp.
Variable Documentation
| const std::map<dev_group, std::vector<option_bundle> > auto_disabling_controls |
Definition at line 1535 of file unit-tests-live.cpp.
Definition at line 1512 of file unit-tests-live.cpp.
|
static |
Definition at line 3169 of file unit-tests-live.cpp.
|
static |
Definition at line 3569 of file unit-tests-live.cpp.
|
static |
Definition at line 3071 of file unit-tests-live.cpp.
|
static |
Definition at line 2916 of file unit-tests-live.cpp.