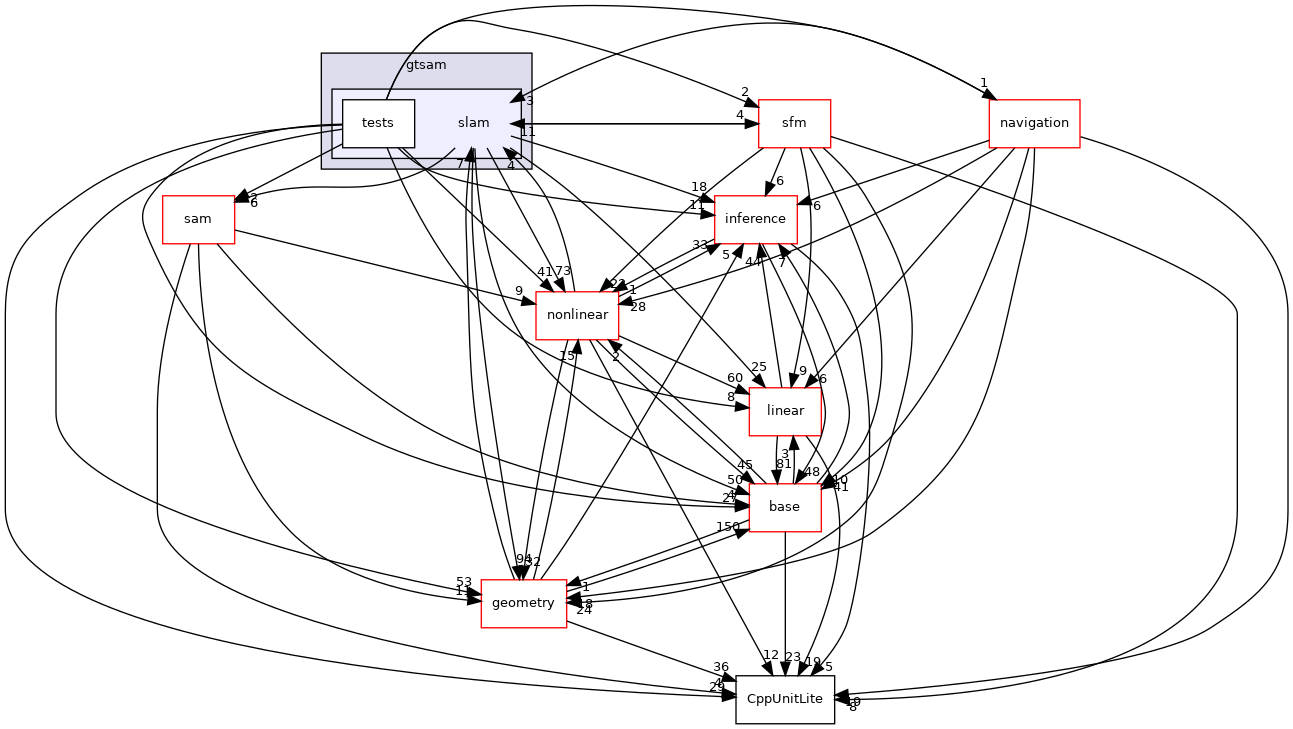
Directory dependency graph for slam:
Directories | |
| directory | tests |
Files | |
| file | AntiFactor.h [code] |
| file | slam/BearingFactor.h [code] |
| file | slam/BearingRangeFactor.h [code] |
| file | BetweenFactor.h [code] |
| file | BoundingConstraint.h [code] |
| Provides partially implemented constraints to implement bounds. | |
| file | dataset.cpp [code] |
| utility functions for loading datasets | |
| file | dataset.h [code] |
| utility functions for loading datasets | |
| file | EssentialMatrixConstraint.cpp [code] |
| file | EssentialMatrixConstraint.h [code] |
| file | EssentialMatrixFactor.h [code] |
| file | slam/expressions.h [code] |
| Common expressions for solving geometry/slam/sfm problems. | |
| file | FrobeniusFactor.cpp [code] |
| Various factors that minimize some Frobenius norm. | |
| file | FrobeniusFactor.h [code] |
| Various factors that minimize some Frobenius norm. | |
| file | GeneralSFMFactor.h [code] |
| a general SFM factor with an unknown calibration | |
| file | InitializePose.h [code] |
| common code between lago.* (2D) and InitializePose3.* (3D) | |
| file | InitializePose3.cpp [code] |
| file | InitializePose3.h [code] |
| Initialize Pose3 in a factor graph. | |
| file | JacobianFactorQ.h [code] |
| file | JacobianFactorQR.h [code] |
| file | JacobianFactorSVD.h [code] |
| file | KarcherMeanFactor-inl.h [code] |
| file | KarcherMeanFactor.h [code] |
| file | lago.cpp [code] |
| file | lago.h [code] |
| Initialize Pose2 in a factor graph using LAGO (Linear Approximation for Graph Optimization). see papers: | |
| file | OrientedPlane3Factor.cpp [code] |
| file | OrientedPlane3Factor.h [code] |
| file | PoseRotationPrior.h [code] |
| Implements a prior on the rotation component of a pose. | |
| file | PoseTranslationPrior.h [code] |
| Implements a prior on the translation component of a pose. | |
| file | slam/PriorFactor.h [code] |
| file | ProjectionFactor.h [code] |
| Reprojection of a LANDMARK to a 2D point. | |
| file | slam/RangeFactor.h [code] |
| file | ReferenceFrameFactor.h [code] |
| file | RegularImplicitSchurFactor.h [code] |
| A subclass of GaussianFactor specialized to structureless SFM. | |
| file | RotateFactor.h [code] |
| file | SmartFactorBase.h [code] |
| Base class to create smart factors on poses or cameras. | |
| file | SmartFactorParams.h [code] |
| Collect common parameters for SmartProjection and SmartStereoProjection factors. | |
| file | SmartProjectionFactor.h [code] |
| Smart factor on cameras (pose + calibration) | |
| file | SmartProjectionPoseFactor.h [code] |
| Smart factor on poses, assuming camera calibration is fixed. | |
| file | SmartProjectionRigFactor.h [code] |
| Smart factor on poses, assuming camera calibration is fixed. Same as SmartProjectionPoseFactor, except: | |
| file | StereoFactor.h [code] |
| A non-linear factor for stereo measurements. | |
| file | TriangulationFactor.h [code] |