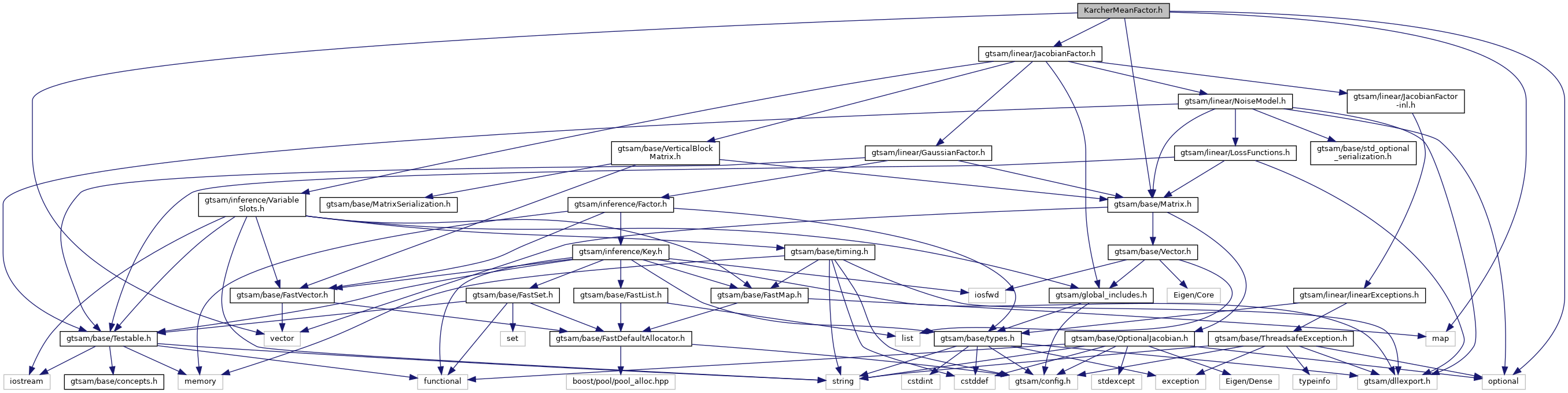
#include <gtsam/base/Matrix.h>#include <gtsam/linear/JacobianFactor.h>#include <map>#include <vector>#include <optional>
Include dependency graph for KarcherMeanFactor.h:
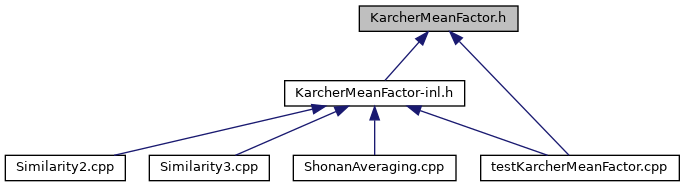
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::KarcherMeanFactor< T > |
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| template<class T > | |
| std::enable_if< traits< T >::IsLieGroup, T >::type | gtsam::FindKarcherMean (const std::vector< T, Eigen::aligned_allocator< T >> &elements) |
| template<class T > | |
| std::enable_if< traits< T >::IsLieGroup, T >::type | gtsam::FindKarcherMean (std::initializer_list< T > &&elements) |
| FindKarcherMean version from initializer list. More... | |