#include <vector>#include <sstream>#include <boost/limits.hpp>#include "youbot_driver/generic/Logger.hpp"#include "youbot_driver/generic/Units.hpp"#include "youbot_driver/generic/Time.hpp"#include "youbot_driver/generic/Exceptions.hpp"#include "youbot_driver/generic-joint/JointParameter.hpp"#include "youbot_driver/youbot/YouBotJointParameter.hpp"#include "youbot_driver/youbot/YouBotSlaveMsg.hpp"#include "youbot_driver/youbot/YouBotSlaveMailboxMsg.hpp"#include "youbot_driver/youbot/YouBotJointStorage.hpp"
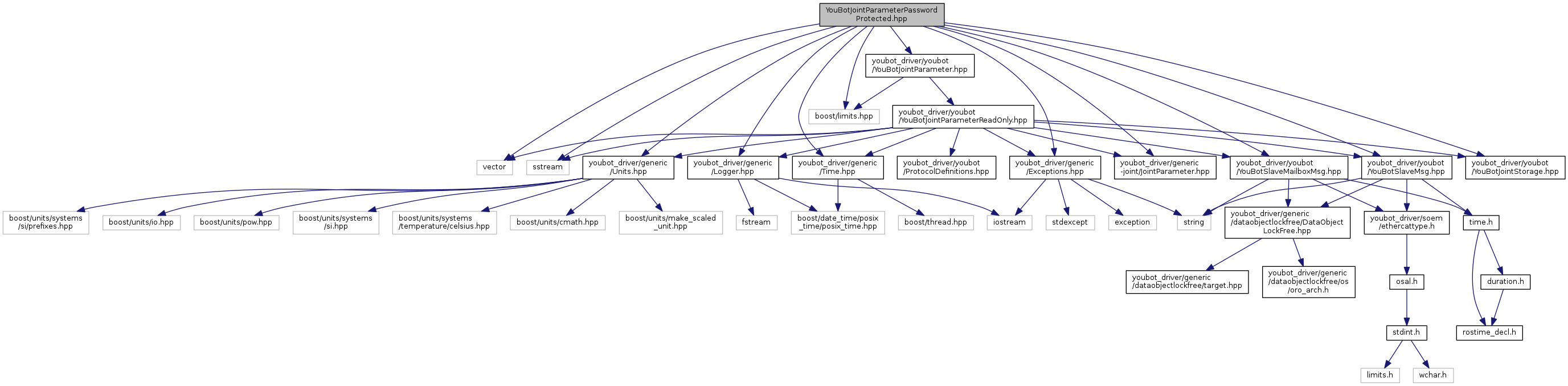
Include dependency graph for YouBotJointParameterPasswordProtected.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | youbot::ActivateOvervoltageProtection |
| Enable overvoltage protection. More... | |
| class | youbot::ActualCommutationOffset |
| This value represents the internal commutation offset. (0 ... max. Encoder steps per rotation) More... | |
| class | youbot::ApproveProtectedParameters |
| Enter a password to approve the change of protected parameters. More... | |
| class | youbot::BEMFConstant |
| BEMF constant of motor. Used for current regulation, position regulation and velocity regulation. Feed forward control for current regulation, position regulation and velocity regulation is disabled if BEMF constant is set to zero. More... | |
| class | youbot::CommutationMode |
| class | youbot::CommutationMotorCurrent |
| Motor current for controlled commutation. This parameter is used in commutation mode 1, 4, 5 and in initialization of sine. More... | |
| class | youbot::CurrentControlLoopDelay |
| Delay of current limitation algorithm / PID current regulator. More... | |
| class | youbot::EncoderResolution |
| Encoder Steps per Rotation. More... | |
| class | youbot::EncoderStopSwitch |
| class | youbot::HallSensorPolarityReversal |
| Hall sensor invert. Sets one of the motors invert with inverted hall scheme, e.g. some Maxon motors. More... | |
| class | youbot::I2tExceedCounter |
| Counts how often an I2t sum was higher than the I2t limit. More... | |
| class | youbot::I2tLimit |
| An actual I2t sum that exceeds this limit leads to increasing the I2t exceed counter. More... | |
| class | youbot::InitializationMode |
| class | youbot::InitSineDelay |
| Duration for sine initialization sequence. This parameter should be set in a way, that the motor has stopped mechanical oscillations after the specified time. More... | |
| class | youbot::MassInertiaConstant |
| Mass inertia constant for position regulation. Compensates mass moment of inertia of rotor. More... | |
| class | youbot::MaximumMotorCurrent |
| maximum allowed current More... | |
| class | youbot::MotorCoilResistance |
| Resistance of motor coil. Used for current resistance regulation, position regulation and velocity regulation. More... | |
| class | youbot::MotorControllerTimeout |
| Set/Get Timeout to determine an interrupted communication with the EtherCAT master. (automatically stored in EEProm) More... | |
| class | youbot::MotorHaltedVelocity |
| If the actual speed is below this value the motor halted flag will be set. [rpm]. More... | |
| class | youbot::MotorPoles |
| Number of motor poles. More... | |
| class | youbot::OperationalTime |
| Counts the module operational time. More... | |
| class | youbot::PIDControlTime |
| PID calculation delay: Set operational frequency PID. More... | |
| class | youbot::ReversingEncoderDirection |
| Encoder direction Set this flag in a way, that turn right increases position counter. More... | |
| class | youbot::SetEncoderCounterZeroAtNextNChannel |
| Set Encoder counter to zero at next N channel event. More... | |
| class | youbot::SetEncoderCounterZeroAtNextSwitch |
| Set encoder counter to zero at next switch event. More... | |
| class | youbot::SetEncoderCounterZeroOnlyOnce |
| class | youbot::SineInitializationVelocity |
| Velocity for sine initialization. [rpm]. More... | |
| class | youbot::StopSwitchPolarity |
| class | youbot::ThermalWindingTimeConstant |
| Thermal winding time constant for the used motor. Used for I2t monitoring. More... | |
| class | youbot::YouBotJointParameterPasswordProtected |
| abstract youBot joint parameter More... | |
Namespaces | |
| youbot | |