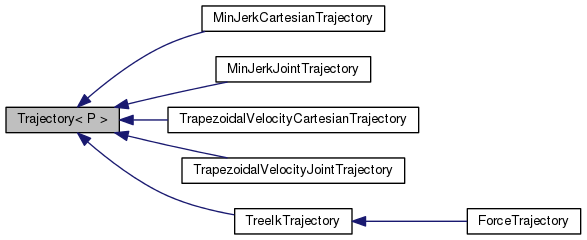
Abstract template Trajectory class. Interface only. More...
#include <Trajectory.h>
Public Types | |
| typedef P | poseType |
Public Member Functions | |
| double | getDuration () const |
| virtual void | getPose (double time, poseType &pose)=0 |
| getPose get pose at a particular time | |
| virtual void | setDuration (double duration_in) |
| Trajectory () | |
| virtual | ~Trajectory () |
Private Attributes | |
| double | duration |
Detailed Description
template<class P>
class Trajectory< P >
Abstract template Trajectory class. Interface only.
Definition at line 23 of file Trajectory.h.
Member Typedef Documentation
| typedef P Trajectory< P >::poseType |
Definition at line 26 of file Trajectory.h.
Constructor & Destructor Documentation
| Trajectory< P >::Trajectory | ( | ) | [inline] |
Definition at line 28 of file Trajectory.h.
| virtual Trajectory< P >::~Trajectory | ( | ) | [inline, virtual] |
Definition at line 29 of file Trajectory.h.
Member Function Documentation
| double Trajectory< P >::getDuration | ( | ) | const [inline] |
Definition at line 31 of file Trajectory.h.
| virtual void Trajectory< P >::getPose | ( | double | time, |
| poseType & | pose | ||
| ) | [pure virtual] |
getPose get pose at a particular time
- Parameters:
-
time time along trajectory (0 - getDuration()) stepPose pose corresponding to the time
each step in a joint trajectory contains the position, velocity, and acceleration
Implemented in TrajectorySequence< P, SynchedTrajectory >, RosMsgSynchedCartesianTrajectory, SynchedTrajectory< P >, and RosMsgJointTrajectory.
| void Trajectory< P >::setDuration | ( | double | duration_in | ) | [virtual] |
Reimplemented in TrapezoidalVelocityCartesianTrajectory, and TrapezoidalVelocityJointTrajectory.
Definition at line 139 of file Trajectory.h.
Member Data Documentation
double Trajectory< P >::duration [private] |
Definition at line 44 of file Trajectory.h.
The documentation for this class was generated from the following file: