#include "SimulatorConfig.h"#include "URDFRobot.h"#include "SimulatedIAUV.h"#include "VirtualCamera.h"#include "VirtualRangeSensor.h"#include "PressureSensor.h"#include "GPSSensor.h"#include "DVLSensor.h"#include "HUDCamera.h"#include "MultibeamSensor.h"#include "UWSimUtils.h"#include "BulletPhysics.h"#include <OpenThreads/Thread>#include <osg/PrimitiveSet>#include <osg/Geode>#include <osg/Vec3>#include <osg/Vec4>#include <osg/Drawable>#include <osg/Geometry>#include <vector>#include <boost/shared_ptr.hpp>#include <ros/ros.h>#include <tf/transform_broadcaster.h>#include <tf/transform_listener.h>#include <sensor_msgs/JointState.h>#include <nav_msgs/Odometry.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/CameraInfo.h>#include <sensor_msgs/distortion_models.h>#include <sensor_msgs/Range.h>#include <image_transport/image_transport.h>#include <geometry_msgs/TwistStamped.h>#include <geometry_msgs/Pose.h>#include <robot_state_publisher/robot_state_publisher.h>#include <pcl_ros/point_cloud.h>
Include dependency graph for ROSInterface.h:

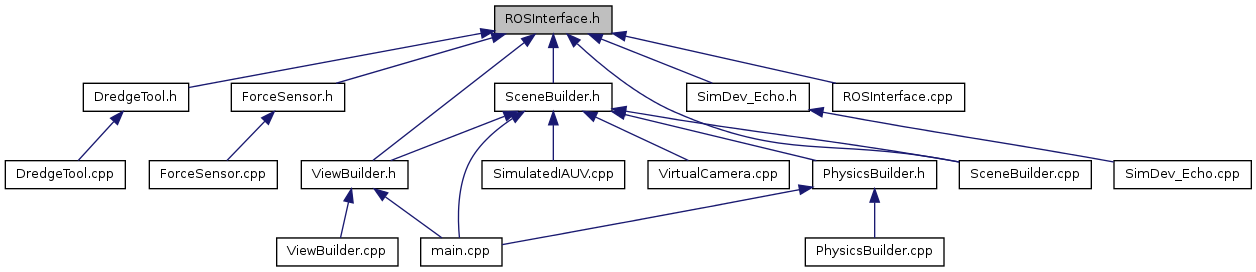
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ArmToROSJointState |
| class | VirtualCameraToROSImage::CameraBufferCallback |
| class | contactSensorToROS |
| class | DVLSensorToROS |
| class | GPSSensorToROS |
| class | ImuToROSImu |
| class | MultibeamSensorToROS |
| class | PATToROSOdom |
| class | PressureSensorToROS |
| class | RangeSensorToROSRange |
| class | ROSImageToHUDCamera |
| class | ROSInterface |
| class | ROSJointStateToArm |
| class | ROSOdomToPAT |
| class | ROSPointCloudLoader |
| class | ROSPoseToPAT |
| class | ROSPublisherInterface |
| class | ROSSubscriberInterface |
| class | ROSTwistToPAT |
| class | VirtualCameraToROSImage |
| class | WorldToROSTF |
Defines | |
| #define | MAX_ELAPSED 1 |
Define Documentation
| #define MAX_ELAPSED 1 |
Definition at line 63 of file ROSInterface.h.