#include <IMUThread.h>
|
| void | disableIMUFiltering () |
| |
| void | enableIMUFiltering (int filteringStrategy=1, const ParametersMap ¶meters=ParametersMap(), bool baseFrameConversion=false) |
| |
| | IMUThread (int rate, const Transform &localTransform) |
| |
| bool | init (const std::string &path) |
| |
| void | setRate (int rate) |
| |
| virtual | ~IMUThread () |
| |
| Handle | getThreadHandle () const |
| |
| unsigned long | getThreadId () const |
| |
| bool | isCreating () const |
| |
| bool | isIdle () const |
| |
| bool | isKilled () const |
| |
| bool | isRunning () const |
| |
| void | join (bool killFirst=false) |
| |
| void | kill () |
| |
| void | setAffinity (int cpu=0) |
| |
| void | setPriority (Priority priority) |
| |
| void | start () |
| |
| | UThread (Priority priority=kPNormal) |
| |
| virtual | ~UThread () |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| virtual | ~UThreadC () |
| |
| virtual | ~UThreadC () |
| |
| | UEventsSender () |
| |
| virtual | ~UEventsSender () |
| |
|
| enum | Priority {
kPLow,
kPBelowNormal,
kPNormal,
kPAboveNormal,
kPRealTime
} |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef void(* | Handler) () |
| |
| typedef void(* | Handler) () |
| |
| static unsigned long | currentThreadId () |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Detach (const Handle &H) |
| |
| static int | Detach (Handle H) |
| |
| static int | Join (const Handle &H) |
| |
| static int | Join (Handle H) |
| |
| static int | Kill (const Handle &H) |
| |
| static int | Kill (Handle H) |
| |
| | UThreadC () |
| |
| | UThreadC () |
| |
| void | post (UEvent *event, bool async=true) const |
| |
| static void | Exit () |
| |
| static void | Exit () |
| |
| static Handle | Self () |
| |
| static int | Self () |
| |
| static void | TestCancel () |
| |
| static void | TestCancel () |
| |
Class IMUThread
Definition at line 49 of file IMUThread.h.
◆ IMUThread()
| rtabmap::IMUThread::IMUThread |
( |
int |
rate, |
|
|
const Transform & |
localTransform |
|
) |
| |
◆ ~IMUThread()
| rtabmap::IMUThread::~IMUThread |
( |
| ) |
|
|
virtual |
◆ disableIMUFiltering()
| void rtabmap::IMUThread::disableIMUFiltering |
( |
| ) |
|
◆ enableIMUFiltering()
◆ init()
| bool rtabmap::IMUThread::init |
( |
const std::string & |
path | ) |
|
◆ mainLoop()
| void rtabmap::IMUThread::mainLoop |
( |
| ) |
|
|
privatevirtual |
◆ mainLoopBegin()
| void rtabmap::IMUThread::mainLoopBegin |
( |
| ) |
|
|
privatevirtual |
◆ setRate()
| void rtabmap::IMUThread::setRate |
( |
int |
rate | ) |
|
◆ _imuBaseFrameConversion
| bool rtabmap::IMUThread::_imuBaseFrameConversion |
|
private |
◆ _imuFilter
◆ captureDelay_
| double rtabmap::IMUThread::captureDelay_ |
|
private |
◆ frameRateTimer_
| UTimer rtabmap::IMUThread::frameRateTimer_ |
|
private |
◆ imuFile_
| std::ifstream rtabmap::IMUThread::imuFile_ |
|
private |
◆ localTransform_
| Transform rtabmap::IMUThread::localTransform_ |
|
private |
◆ previousStamp_
| double rtabmap::IMUThread::previousStamp_ |
|
private |
◆ rate_
| int rtabmap::IMUThread::rate_ |
|
private |
The documentation for this class was generated from the following files:
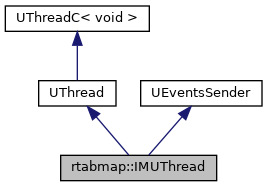
 Public Member Functions inherited from UThread
Public Member Functions inherited from UThread