A data filter takes a point cloud as input, transforms it, and produces another point cloud as output. More...
#include <PointMatcher.h>
Public Member Functions | |
| DataPointsFilter () | |
| Construct without parameter. More... | |
| DataPointsFilter (const std::string &className, const ParametersDoc paramsDoc, const Parameters ¶ms) | |
| Construct with parameters. More... | |
| virtual DataPoints | filter (const DataPoints &input)=0 |
| Apply filters to input point cloud. This is the non-destructive version and returns a copy. More... | |
| virtual void | init () |
| Init this filter. More... | |
| virtual void | inPlaceFilter (DataPoints &cloud)=0 |
| Apply these filters to a point cloud without copying. More... | |
| virtual | ~DataPointsFilter () |
| virtual destructor More... | |
 Public Member Functions inherited from PointMatcherSupport::Parametrizable Public Member Functions inherited from PointMatcherSupport::Parametrizable | |
| template<typename S > | |
| S | get (const std::string ¶mName) |
| Return the value of paramName, lexically-casted to S. More... | |
| std::string | getParamValueString (const std::string ¶mName) |
| Get the value of a parameter, as a string. More... | |
| template<typename T > | |
| std::vector< T > | getVector (const std::string ¶mName) |
| Return the value of paramName, lexically-casted std::vector<S> More... | |
| Parametrizable () | |
| Construct a documentation of parameters from a description in the source. More... | |
| Parametrizable (const std::string &className, const ParametersDoc paramsDoc, const Parameters ¶ms) | |
| Construct with documented parameters. More... | |
| virtual | ~Parametrizable () |
| Virtual destructor, do nothing. More... | |
Additional Inherited Members | |
| Public Types inherited from PointMatcherSupport::Parametrizable | |
| typedef bool(* | LexicalComparison) (std::string a, std::string b) |
| A function that returns whether a is smaller than b. More... | |
| typedef std::string | Parameter |
| alias More... | |
| typedef std::map< std::string, Parameter > | Parameters |
| Parameters stored as a map of string->string. More... | |
| typedef std::vector< ParameterDoc > | ParametersDoc |
| The documentation of all parameters. More... | |
| typedef std::set< std::string > | ParametersUsed |
| Parameters whose value has been read. More... | |
| Static Public Member Functions inherited from PointMatcherSupport::Parametrizable | |
| template<typename S > | |
| static bool | Comp (std::string a, std::string b) |
| Return whether a < b, lexically casted to S. More... | |
| Public Attributes inherited from PointMatcherSupport::Parametrizable | |
| const std::string | className |
| name of the class More... | |
| Parameters | parameters |
| parameters with their values encoded in string More... | |
| const ParametersDoc | parametersDoc |
| documentation of parameters More... | |
| ParametersUsed | parametersUsed |
| parameters whose value has actually been read More... | |
Detailed Description
template<typename T>
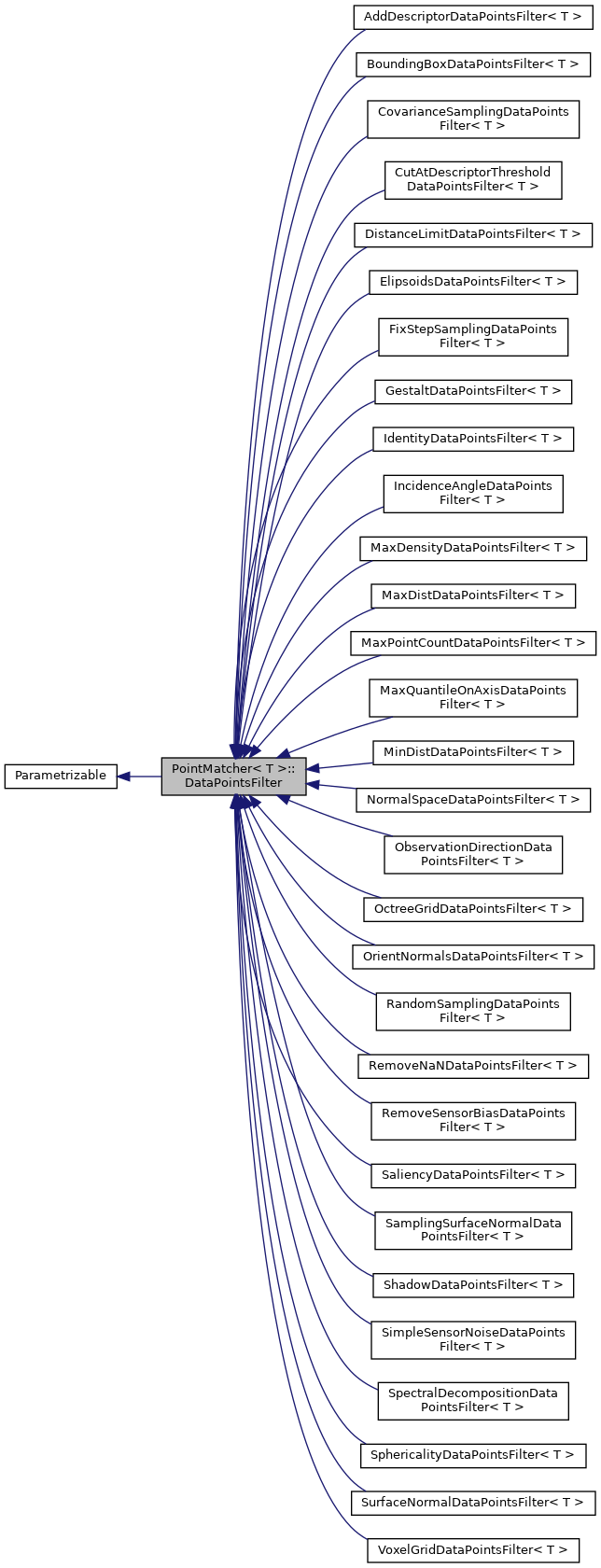
struct PointMatcher< T >::DataPointsFilter
A data filter takes a point cloud as input, transforms it, and produces another point cloud as output.
The filter might add information, for instance surface normals, or might change the number of points, for instance by randomly removing some of them.
Definition at line 440 of file PointMatcher.h.
Constructor & Destructor Documentation
◆ DataPointsFilter() [1/2]
| PointMatcher< T >::DataPointsFilter::DataPointsFilter |
Construct without parameter.
Definition at line 43 of file DataPointsFilter.cpp.
◆ DataPointsFilter() [2/2]
| PointMatcher< T >::DataPointsFilter::DataPointsFilter | ( | const std::string & | className, |
| const ParametersDoc | paramsDoc, | ||
| const Parameters & | params | ||
| ) |
Construct with parameters.
Definition at line 48 of file DataPointsFilter.cpp.
◆ ~DataPointsFilter()
|
virtual |
virtual destructor
Definition at line 54 of file DataPointsFilter.cpp.
Member Function Documentation
◆ filter()
|
pure virtual |
Apply filters to input point cloud. This is the non-destructive version and returns a copy.
Implemented in OctreeGridDataPointsFilter< T >, SpectralDecompositionDataPointsFilter< T >, SurfaceNormalDataPointsFilter< T >, VoxelGridDataPointsFilter< T >, SaliencyDataPointsFilter< T >, CovarianceSamplingDataPointsFilter< T >, SphericalityDataPointsFilter< T >, NormalSpaceDataPointsFilter< T >, BoundingBoxDataPointsFilter< T >, AngleLimitDataPointsFilter< T >, ObservationDirectionDataPointsFilter< T >, FixStepSamplingDataPointsFilter< T >, RemoveSensorBiasDataPointsFilter< T >, CutAtDescriptorThresholdDataPointsFilter< T >, RandomSamplingDataPointsFilter< T >, SimpleSensorNoiseDataPointsFilter< T >, DistanceLimitDataPointsFilter< T >, MaxQuantileOnAxisDataPointsFilter< T >, ShadowDataPointsFilter< T >, MaxPointCountDataPointsFilter< T >, MaxDistDataPointsFilter< T >, MinDistDataPointsFilter< T >, MaxDensityDataPointsFilter< T >, OrientNormalsDataPointsFilter< T >, IncidenceAngleDataPointsFilter< T >, AddDescriptorDataPointsFilter< T >, IdentityDataPointsFilter< T >, and RemoveNaNDataPointsFilter< T >.
◆ init()
|
virtual |
Init this filter.
Reimplemented in FixStepSamplingDataPointsFilter< T >.
Definition at line 59 of file DataPointsFilter.cpp.
◆ inPlaceFilter()
|
pure virtual |
Apply these filters to a point cloud without copying.
Implemented in OctreeGridDataPointsFilter< T >, SpectralDecompositionDataPointsFilter< T >, SurfaceNormalDataPointsFilter< T >, VoxelGridDataPointsFilter< T >, SaliencyDataPointsFilter< T >, CovarianceSamplingDataPointsFilter< T >, SphericalityDataPointsFilter< T >, NormalSpaceDataPointsFilter< T >, BoundingBoxDataPointsFilter< T >, AngleLimitDataPointsFilter< T >, ObservationDirectionDataPointsFilter< T >, FixStepSamplingDataPointsFilter< T >, RemoveSensorBiasDataPointsFilter< T >, CutAtDescriptorThresholdDataPointsFilter< T >, RandomSamplingDataPointsFilter< T >, SimpleSensorNoiseDataPointsFilter< T >, DistanceLimitDataPointsFilter< T >, MaxQuantileOnAxisDataPointsFilter< T >, ShadowDataPointsFilter< T >, MaxPointCountDataPointsFilter< T >, MaxDistDataPointsFilter< T >, MinDistDataPointsFilter< T >, MaxDensityDataPointsFilter< T >, OrientNormalsDataPointsFilter< T >, IncidenceAngleDataPointsFilter< T >, AddDescriptorDataPointsFilter< T >, IdentityDataPointsFilter< T >, and RemoveNaNDataPointsFilter< T >.
The documentation for this struct was generated from the following files: