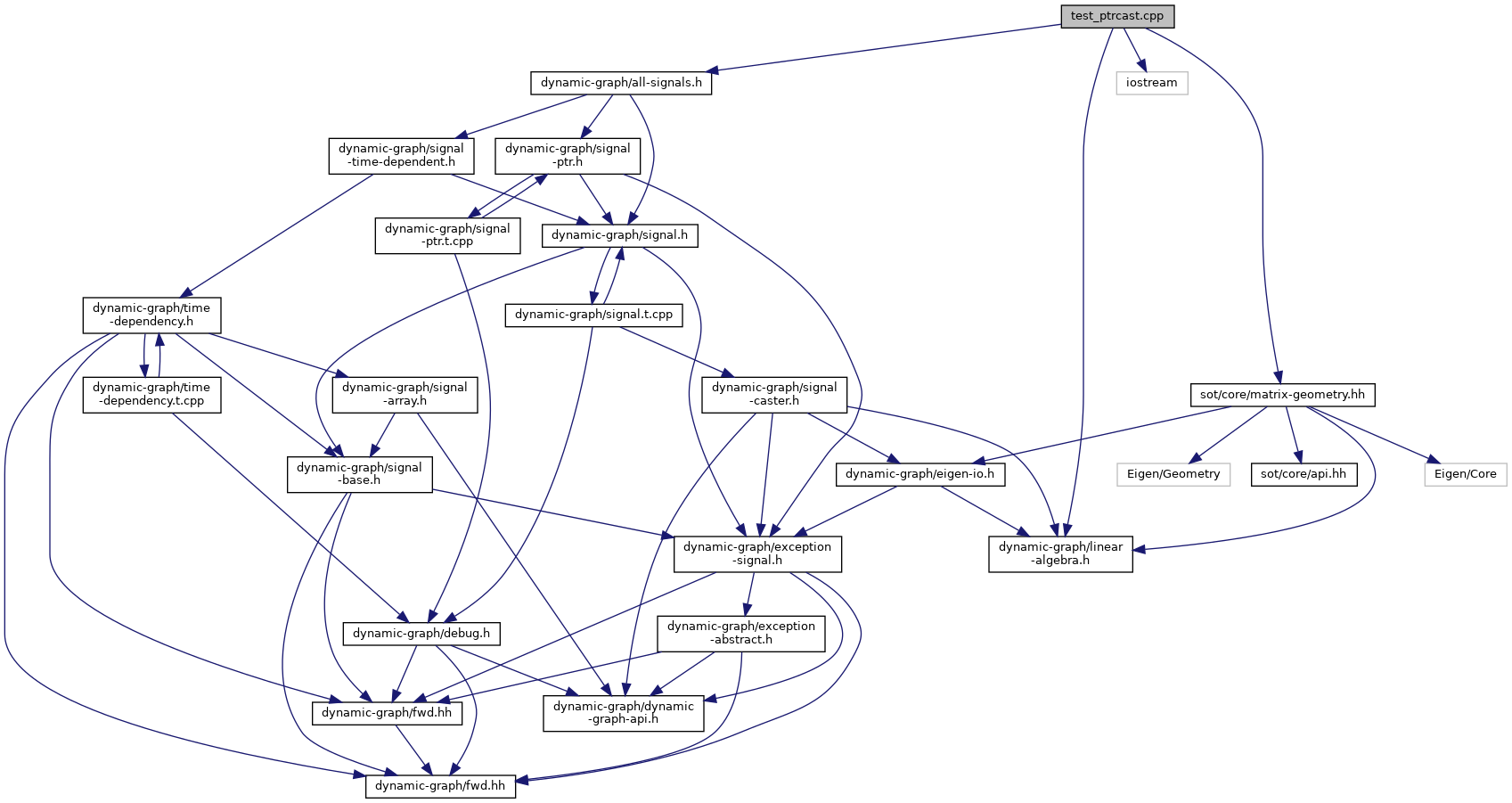
#include <dynamic-graph/all-signals.h>#include <dynamic-graph/linear-algebra.h>#include <iostream>#include <sot/core/matrix-geometry.hh>
Include dependency graph for test_ptrcast.cpp:
Go to the source code of this file.
Functions | |
| int | main (void) |
Variables | |
| Signal< dynamicgraph::Matrix, int > | base ("base") |
| Signal< dynamicgraph::Matrix, int > | sig ("matrix") |
| Signal< MatrixRotation, int > | sigMR ("matrixRot") |
Function Documentation
◆ main()
| int main | ( | void | ) |
Definition at line 28 of file test_ptrcast.cpp.
Variable Documentation
◆ base
| SignalPtr< dynamicgraph::Matrix, int > sigptr & base |
Definition at line 24 of file test_ptrcast.cpp.
◆ sig
| Signal<dynamicgraph::Matrix, int> sig("matrix") |
◆ sigMR
| Signal<MatrixRotation, int> sigMR("matrixRot") |