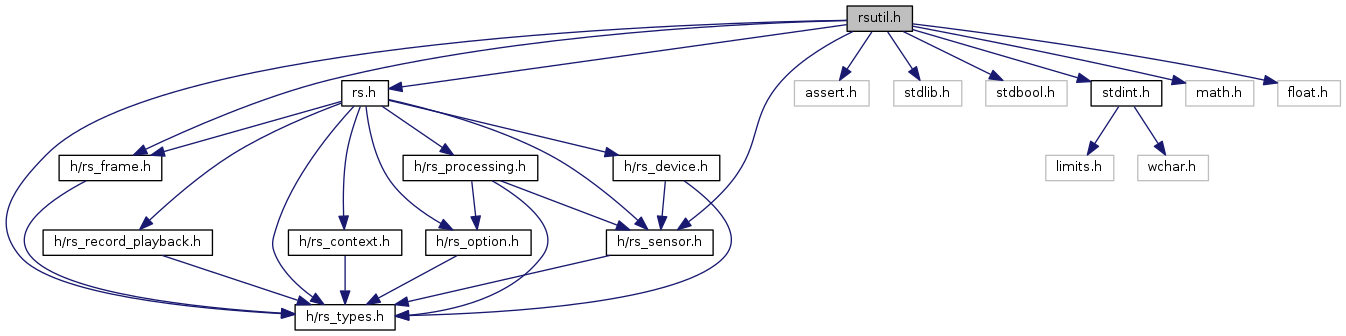
#include "h/rs_types.h"
#include "h/rs_sensor.h"
#include "h/rs_frame.h"
#include "rs.h"
#include "assert.h"
#include <stdlib.h>
#include <stdbool.h>
#include <stdint.h>
#include <math.h>
#include <float.h>
Go to the source code of this file.
|
| static void | adjust_2D_point_to_boundary (float p[2], int width, int height) |
| |
| static bool | is_pixel_in_line (const float curr[2], const float start[2], const float end[2]) |
| |
| static void | next_pixel_in_line (float curr[2], const float start[2], const float end[2]) |
| |
| static void | rs2_deproject_pixel_to_point (float point[3], const struct rs2_intrinsics *intrin, const float pixel[2], float depth) |
| |
| static void | rs2_fov (const struct rs2_intrinsics *intrin, float to_fov[2]) |
| |
| static void | rs2_project_color_pixel_to_depth_pixel (float to_pixel[2], const uint16_t *data, float depth_scale, float depth_min, float depth_max, const struct rs2_intrinsics *depth_intrin, const struct rs2_intrinsics *color_intrin, const struct rs2_extrinsics *color_to_depth, const struct rs2_extrinsics *depth_to_color, const float from_pixel[2]) |
| |
| static void | rs2_project_point_to_pixel (float pixel[2], const struct rs2_intrinsics *intrin, const float point[3]) |
| |
| static void | rs2_transform_point_to_point (float to_point[3], const struct rs2_extrinsics *extrin, const float from_point[3]) |
| |
| static void adjust_2D_point_to_boundary |
( |
float |
p[2], |
|
|
int |
width, |
|
|
int |
height |
|
) |
| |
|
static |
| static bool is_pixel_in_line |
( |
const float |
curr[2], |
|
|
const float |
start[2], |
|
|
const float |
end[2] |
|
) |
| |
|
static |
| static void next_pixel_in_line |
( |
float |
curr[2], |
|
|
const float |
start[2], |
|
|
const float |
end[2] |
|
) |
| |
|
static |
| static void rs2_deproject_pixel_to_point |
( |
float |
point[3], |
|
|
const struct rs2_intrinsics * |
intrin, |
|
|
const float |
pixel[2], |
|
|
float |
depth |
|
) |
| |
|
static |
| static void rs2_project_color_pixel_to_depth_pixel |
( |
float |
to_pixel[2], |
|
|
const uint16_t * |
data, |
|
|
float |
depth_scale, |
|
|
float |
depth_min, |
|
|
float |
depth_max, |
|
|
const struct rs2_intrinsics * |
depth_intrin, |
|
|
const struct rs2_intrinsics * |
color_intrin, |
|
|
const struct rs2_extrinsics * |
color_to_depth, |
|
|
const struct rs2_extrinsics * |
depth_to_color, |
|
|
const float |
from_pixel[2] |
|
) |
| |
|
static |
| static void rs2_project_point_to_pixel |
( |
float |
pixel[2], |
|
|
const struct rs2_intrinsics * |
intrin, |
|
|
const float |
point[3] |
|
) |
| |
|
static |
| static void rs2_transform_point_to_point |
( |
float |
to_point[3], |
|
|
const struct rs2_extrinsics * |
extrin, |
|
|
const float |
from_point[3] |
|
) |
| |
|
static |