#include <librealsense2/rs.hpp>#include <GLFW/glfw3.h>#include <string>#include <sstream>#include <iostream>#include <algorithm>#include <iomanip>#include <cmath>#include <map>#include <functional>#include "../third-party/stb_easy_font.h"
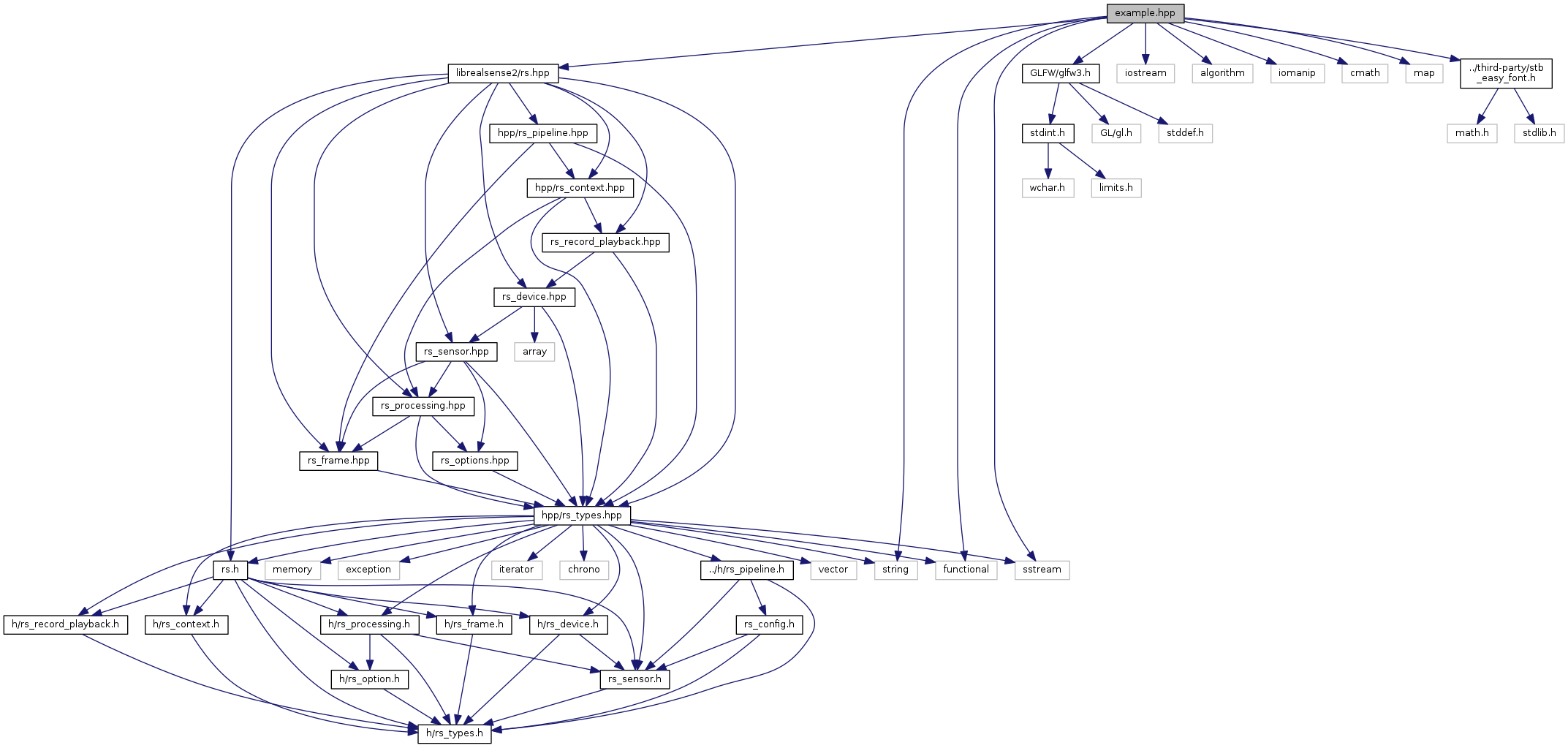
Include dependency graph for example.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | float2 |
| struct | float3 |
| struct | glfw_state |
| class | imu_renderer |
| class | pose_renderer |
| struct | rect |
| struct | text_renderer |
| Print flat 2D text over openGl window. More... | |
| class | texture |
| The texture class. More... | |
| struct | tile_properties |
| class | window |
| struct | window_key_listener |
Macros | |
| #define | GL_SILENCE_DEPRECATION |
| #define | GLFW_INCLUDE_GLU |
| #define | PI 3.14159265358979323846 |
| #define | PI_FL 3.141592f |
Typedefs | |
| using | frame_and_tile_property = std::pair< rs2::frame, tile_properties > |
| using | frames_mosaic = std::map< int, frame_and_tile_property > |
Enumerations | |
| enum | Priority { Priority::high = 0, Priority::medium = -1, Priority::low = -2 } |
Functions | |
| void | draw_pointcloud (float width, float height, glfw_state &app_state, rs2::points &points) |
| void | draw_pointcloud_wrt_world (float width, float height, glfw_state &app_state, rs2::points &points, rs2_pose &pose, float H_t265_d400[16], std::vector< rs2_vector > &trajectory) |
| void | draw_text (int x, int y, const char *text) |
| void | quat2mat (rs2_quaternion &q, GLfloat H[16]) |
| void | register_glfw_callbacks (window &app, glfw_state &app_state) |
| void | set_viewport (const rect &r) |
Variables | |
| const float | IMU_FRAME_HEIGHT = 720.f |
| const float | IMU_FRAME_WIDTH = 1280.f |
Macro Definition Documentation
| #define GL_SILENCE_DEPRECATION |
Definition at line 8 of file example.hpp.
| #define GLFW_INCLUDE_GLU |
Definition at line 9 of file example.hpp.
| #define PI 3.14159265358979323846 |
Definition at line 24 of file example.hpp.
| #define PI_FL 3.141592f |
Definition at line 25 of file example.hpp.
Typedef Documentation
| using frame_and_tile_property = std::pair<rs2::frame, tile_properties> |
Definition at line 100 of file example.hpp.
| using frames_mosaic = std::map<int, frame_and_tile_property> |
Definition at line 101 of file example.hpp.
Enumeration Type Documentation
|
strong |
| Enumerator | |
|---|---|
| high | |
| medium | |
| low | |
Definition at line 29 of file example.hpp.
Function Documentation
| void draw_pointcloud | ( | float | width, |
| float | height, | ||
| glfw_state & | app_state, | ||
| rs2::points & | points | ||
| ) |
Definition at line 886 of file example.hpp.
| void draw_pointcloud_wrt_world | ( | float | width, |
| float | height, | ||
| glfw_state & | app_state, | ||
| rs2::points & | points, | ||
| rs2_pose & | pose, | ||
| float | H_t265_d400[16], | ||
| std::vector< rs2_vector > & | trajectory | ||
| ) |
Definition at line 952 of file example.hpp.
|
inline |
Definition at line 109 of file example.hpp.
| void quat2mat | ( | rs2_quaternion & | q, |
| GLfloat | H[16] | ||
| ) |
Definition at line 943 of file example.hpp.
| void register_glfw_callbacks | ( | window & | app, |
| glfw_state & | app_state | ||
| ) |
Definition at line 1037 of file example.hpp.
Definition at line 118 of file example.hpp.
Variable Documentation
| const float IMU_FRAME_HEIGHT = 720.f |
Definition at line 28 of file example.hpp.
| const float IMU_FRAME_WIDTH = 1280.f |
Definition at line 27 of file example.hpp.