Implements a PID control law to be used within a Controller. More...
#include <pid_controller.hpp>
Protected Attributes | |
| DVector | dWeights |
| DVector | iValue |
| DVector | iWeights |
| DVector | lastError |
| uint | nInputs |
| uint | nOutputs |
| DVector | pWeights |
 Protected Attributes inherited from ControlLaw Protected Attributes inherited from ControlLaw | |
| DVector | p |
| DVector | u |
| Protected Attributes inherited from SimulationBlock | |
| BlockName | name |
| RealClock | realClock |
| double | samplingTime |
| Protected Attributes inherited from UserInteraction | |
| BlockStatus | status |
| Protected Attributes inherited from Options | |
| std::vector< OptionsList > | lists |
| Protected Attributes inherited from Logging | |
| std::vector< LogRecord > | logCollection |
| int | logIdx |
| Protected Attributes inherited from Plotting | |
| PlotCollection | plotCollection |
| Protected Attributes inherited from ClippingFunctionality | |
| DVector | lowerLimitControls |
| DVector | lowerLimitParameters |
| DVector | upperLimitControls |
| DVector | upperLimitParameters |
Detailed Description
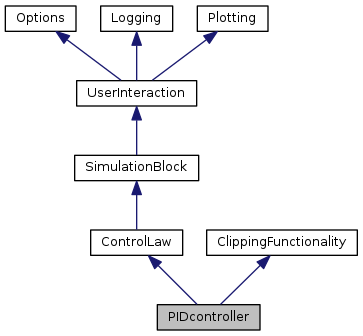
Implements a PID control law to be used within a Controller.
The class PIDcontroller implements a PID control law to be used within a Controller.
For each input component, the weight for the proportional, integral and derivative term can be specified. The PID controller can be used in one of two different modes, depending on the number of inputs and outputs:
i) nOutputs = nInputs: Each output component is determined by the sum of the P, I, and D weight on the corresponding input component.
ii) nOutputs = 1: The component is determined by the sum of the P, I, and D weights on all input components.
Definition at line 67 of file pid_controller.hpp.
Constructor & Destructor Documentation
| BEGIN_NAMESPACE_ACADO PIDcontroller::PIDcontroller | ( | ) |
Default constructor.
Definition at line 46 of file pid_controller.cpp.
| PIDcontroller::PIDcontroller | ( | uint | _nInputs, |
| uint | _nOutputs, | ||
| double | _samplingTime = DEFAULT_SAMPLING_TIME |
||
| ) |
Constructor which takes the number of inputs and outputs of the PID controller as well as the sampling time.
- Parameters
-
[in] _nInputs Number of inputs. [in] _nOutputs Number of outputs. [in] _samplingTime Sampling time.
Definition at line 55 of file pid_controller.cpp.
| PIDcontroller::PIDcontroller | ( | const PIDcontroller & | rhs | ) |
Copy constructor (deep copy).
@param[in] rhs Right-hand side object.
Definition at line 88 of file pid_controller.cpp.
|
virtual |
Destructor.
Definition at line 102 of file pid_controller.cpp.
Member Function Documentation
|
virtual |
Clone constructor (deep copy).
\return Pointer to deep copy of base class type
Implements ControlLaw.
Definition at line 129 of file pid_controller.cpp.
|
protected |
Actually calculates the current control action based on the given current error.
- Parameters
-
[in] error Current error (difference to reference value). [out] output Current control action.
- Returns
- SUCCESSFUL_RETURN
Definition at line 321 of file pid_controller.cpp.
|
virtual |
Returns number of parameters.
- Returns
- Number of parameters
Reimplemented from ControlLaw.
Definition at line 283 of file pid_controller.cpp.
|
virtual |
Returns number of controls. This is the same as the number of outputs.
- Returns
- Number of controls
Reimplemented from ControlLaw.
Definition at line 277 of file pid_controller.cpp.
|
inline |
Returns number of input components of the PID controller.
- Returns
- Number of input components
|
inline |
Returns number of output components of the PID controller.
- Returns
- Number of output components
|
virtual |
Returns number of (estimated) disturbances.
- Returns
- Number of (estimated) disturbances
Reimplemented from ControlLaw.
Definition at line 289 of file pid_controller.cpp.
|
virtual |
Returns number of (estimated) differential states. This is the same as the number of inputs.
- Returns
- Number of (estimated) differential states
Reimplemented from ControlLaw.
Definition at line 265 of file pid_controller.cpp.
|
virtual |
Returns number of (estimated) algebraic states.
- Returns
- Number of (estimated) algebraic states
Reimplemented from ControlLaw.
Definition at line 271 of file pid_controller.cpp.
|
virtual |
Returns number of process outputs.
- Returns
- Number of process outputs
Reimplemented from ControlLaw.
Definition at line 295 of file pid_controller.cpp.
|
virtual |
Initializes the control law with given start values and performs a number of consistency checks.
- Parameters
-
[in] _startTime Start time. [in] _x Initial value for differential states. [in] _p Initial value for parameters. [in] _yRef Initial value for reference trajectory.
- Returns
- SUCCESSFUL_RETURN
Implements ControlLaw.
Definition at line 173 of file pid_controller.cpp.
|
virtual |
Returns whether the control law is based on dynamic optimization or a static one.
- Returns
- BT_TRUE iff control law is based on dynamic optimization,
BT_FALSE otherwise
Implements ControlLaw.
Definition at line 301 of file pid_controller.cpp.
|
virtual |
Returns whether the control law is a static one or based on dynamic optimization.
- Returns
- BT_TRUE iff control law is a static one,
BT_FALSE otherwise
Implements ControlLaw.
Definition at line 307 of file pid_controller.cpp.
| PIDcontroller & PIDcontroller::operator= | ( | const PIDcontroller & | rhs | ) |
Assignment operator (deep copy).
@param[in] rhs Right-hand side object.
Definition at line 107 of file pid_controller.cpp.
| returnValue PIDcontroller::setDerivativeWeights | ( | const DVector & | _dWeights | ) |
Assigns new derivative weights to the input components.
@param[in] _dWeights New derivative weights.
- Returns
- SUCCESSFUL_RETURN,
RET_VECTOR_DIMENSION_MISMATCH
Definition at line 160 of file pid_controller.cpp.
| returnValue PIDcontroller::setIntegralWeights | ( | const DVector & | _iWeights | ) |
Assigns new integral weights to the input components.
@param[in] _iWeights New integral weights.
- Returns
- SUCCESSFUL_RETURN,
RET_VECTOR_DIMENSION_MISMATCH
Definition at line 148 of file pid_controller.cpp.
| returnValue PIDcontroller::setProportionalWeights | ( | const DVector & | _pWeights | ) |
Assigns new proportional weights to the input components.
@param[in] _pWeights New proportional weights.
- Returns
- SUCCESSFUL_RETURN,
RET_VECTOR_DIMENSION_MISMATCH
Definition at line 136 of file pid_controller.cpp.
|
virtual |
Performs next step of the control law based on given inputs.
@param[in] currentTime Current time. @param[in] _x Most recent value for differential states. @param[in] _p Most recent value for parameters. @param[in] _yRef Current piece of reference trajectory.
- Returns
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_VECTOR_DIMENSION_MISMATCH,
RET_CONTROLLAW_STEP_FAILED
Implements ControlLaw.
Definition at line 214 of file pid_controller.cpp.
Member Data Documentation
|
protected |
Derivative weights for all input components.
Definition at line 278 of file pid_controller.hpp.
|
protected |
Integrated value for each input component.
Definition at line 280 of file pid_controller.hpp.
|
protected |
Integral weights for all input components.
Definition at line 277 of file pid_controller.hpp.
|
protected |
Last error input (to be used for calculating the derivative via finite differences).
Definition at line 281 of file pid_controller.hpp.
|
protected |
Number of inputs.
Definition at line 273 of file pid_controller.hpp.
|
protected |
Number of outputs.
Definition at line 274 of file pid_controller.hpp.
|
protected |
Proportional weights for all input components.
Definition at line 276 of file pid_controller.hpp.
The documentation for this class was generated from the following files: