Calculates the control inputs of the Process based on the Process outputs. More...
#include <controller.hpp>
Protected Attributes | |
| ControlLaw * | controlLaw |
| RealClock | controlLawClock |
| Estimator * | estimator |
| BooleanType | isEnabled |
| ReferenceTrajectory * | referenceTrajectory |
 Protected Attributes inherited from SimulationBlock Protected Attributes inherited from SimulationBlock | |
| BlockName | name |
| RealClock | realClock |
| double | samplingTime |
| Protected Attributes inherited from UserInteraction | |
| BlockStatus | status |
| Protected Attributes inherited from Options | |
| std::vector< OptionsList > | lists |
| Protected Attributes inherited from Logging | |
| std::vector< LogRecord > | logCollection |
| int | logIdx |
| Protected Attributes inherited from Plotting | |
| PlotCollection | plotCollection |
Detailed Description
Calculates the control inputs of the Process based on the Process outputs.
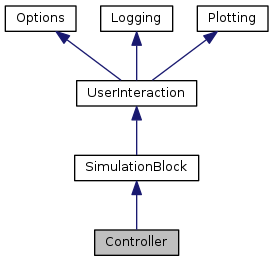
The class Controller is one of the two main building-blocks within the SimulationEnvironment and complements the Process. It contains an online control law (e.g. a DynamicFeedbackLaw comprising a RealTimeAlgorithm) for obtaining the control inputs of the Process.
A state/parameter estimator as well as a ReferenceTrajectory can optionally be used to provide estimated quantities and a reference values to the control law. The reference trajectory can either be specified beforehand as member of the Controller or, alternatively, provided at each step in order to allow for reference trajectories that can be adapted online.
Definition at line 71 of file controller.hpp.
Constructor & Destructor Documentation
| BEGIN_NAMESPACE_ACADO Controller::Controller | ( | ) |
Default constructor.
Definition at line 45 of file controller.cpp.
| Controller::Controller | ( | ControlLaw & | _controlLaw, |
| Estimator & | _estimator, | ||
| ReferenceTrajectory & | _referenceTrajectory = emptyReferenceTrajectory |
||
| ) |
Constructor which takes a control law, an estimator and a reference trajectory for computing the control/parameter signals.
- Parameters
-
[in] _controlLaw Control law to be used for computing the control/parameter signals. [in] _estimator Estimator for estimating quantities required by the control law based on the process output. [in] _referenceTrajectory Reference trajectory to be used by the control law.
Definition at line 60 of file controller.cpp.
| Controller::Controller | ( | ControlLaw & | _controlLaw, |
| ReferenceTrajectory & | _referenceTrajectory = emptyReferenceTrajectory |
||
| ) |
Constructor which takes a control law and a reference trajectory for computing the control/parameter signals.
- Parameters
-
[in] _controlLaw Control law to be used for computing the control/parameter signals. [in] _referenceTrajectory Reference trajectory to be used by the control law.
Definition at line 92 of file controller.cpp.
| Controller::Controller | ( | const Controller & | rhs | ) |
Copy constructor (deep copy).
@param[in] rhs Right-hand side object.
Definition at line 120 of file controller.cpp.
|
virtual |
Destructor.
Definition at line 141 of file controller.cpp.
Member Function Documentation
|
inline |
Disables the controller (i.e. initial values kept and no steps are performed).
- Returns
- SUCCESSFUL_RETURN
|
inline |
Enables the controller.
- Returns
- SUCCESSFUL_RETURN
|
virtual |
Performs next feedback step of the contoller based on given inputs.
@param[in] currentTime Current time.
@param[in] _y Most recent process output.
@param[in] _yRef Current piece of reference trajectory (if not specified during previous preparationStep).
\note If a non-empty reference trajectory is provided, this one is used
instead of the possibly set-up build-in one.
- Returns
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_CONTROLLER_STEP_FAILED,
RET_NO_CONTROLLAW_SPECIFIED
Definition at line 424 of file controller.cpp.
|
protectedvirtual |
Returns current piece of the reference trajectory starting at given time.
@param[in] tStart Start time of reference piece. @param[out] _yRef Current piece of the reference trajectory.
- Returns
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS
Definition at line 573 of file controller.cpp.
| double Controller::getNextSamplingInstant | ( | double | currentTime | ) |
Determines next sampling instant of controller based on the sampling times of control law and estimator
- Parameters
-
[in] currentTime Current time.
- Returns
- Next sampling instant of controller.
Definition at line 518 of file controller.cpp.
|
inline |
Returns number of parameter signals computed by the controller.
\return Number of parameter signals
|
inline |
Returns number of control signals computed by the controller.
\return Number of control signals
|
inline |
Returns number of process outputs expected by the controller.
\return Number of process outputs
|
inline |
Returns computed parameter signals.
@param[out] _y Computed parameter signals.
- Returns
- SUCCESSFUL_RETURN
|
inline |
Returns previous real runtime of the controller (e.g. for determining computational delay).
- Returns
- Previous real runtime of the controller.
|
inline |
Returns sampling time of control law.
- Returns
- Sampling time of control law.
|
inline |
Returns sampling time of estimator.
- Returns
- Sampling time of estimator.
|
inline |
Returns computed control signals.
@param[out] _y Computed control signals.
- Returns
- SUCCESSFUL_RETURN
|
inline |
Returns whether controller comprises a dynamic control law.
- Returns
- BT_TRUE iff controller comprises a dynamic control law,
BT_FALSE otherwise
|
inline |
Returns whether controller comprises an estimator.
- Returns
- BT_TRUE iff controller comprises an estimator,
BT_FALSE otherwise
|
inline |
Returns whether controller comprises a build-in reference trajectory.
- Returns
- BT_TRUE iff controller comprises a build-in reference trajectory,
BT_FALSE otherwise
|
inline |
Returns whether controller comprises a static control law.
- Returns
- BT_TRUE iff controller comprises a static control law,
BT_FALSE otherwise
|
virtual |
Initializes the controller with given start values and performs a number of consistency checks.
- Parameters
-
[in] _startTime Start time. [in] _x0 Initial value for differential states. [in] _p Initial value for parameters. [in] _yRef Initial value for reference trajectory.
- Note
- If a non-empty reference trajectory is provided, this one is used instead of the possibly set-up build-in one.
- Returns
- SUCCESSFUL_RETURN,
RET_CONTROLLER_INIT_FAILED,
RET_NO_CONTROLLAW_SPECIFIED,
RET_BLOCK_DIMENSION_MISMATCH
Definition at line 270 of file controller.cpp.
| returnValue Controller::initializeAlgebraicStates | ( | const VariablesGrid & | _xa_init | ) |
Initializes algebraic states of the control law.
@param[in] _xa_init Initial value for algebraic states.
- Returns
- SUCCESSFUL_RETURN
Definition at line 246 of file controller.cpp.
| returnValue Controller::initializeAlgebraicStates | ( | const char * | fileName | ) |
Initializes algebraic states of the control law from data file.
@param[in] fileName Name of file containing initial value for algebraic states.
- Returns
- SUCCESSFUL_RETURN,
RET_FILE_CAN_NOT_BE_OPENED
Definition at line 256 of file controller.cpp.
|
virtual |
Definition at line 383 of file controller.cpp.
| Controller & Controller::operator= | ( | const Controller & | rhs | ) |
Assignment operator (deep copy).
@param[in] rhs Right-hand side object.
Definition at line 154 of file controller.cpp.
|
virtual |
Performs next preparation step of the contoller based on given inputs.
@param[in] nextTime Time at next step.
@param[in] _yRef Piece of reference trajectory for next step (required for hotstarting).
\note If a non-empty reference trajectory is provided, this one is used
instead of the possibly set-up build-in one.
- Returns
- SUCCESSFUL_RETURN,
RET_CONTROLLER_STEP_FAILED,
RET_NO_CONTROLLAW_SPECIFIED
Definition at line 474 of file controller.cpp.
| returnValue Controller::setControlLaw | ( | ControlLaw & | _controlLaw | ) |
Assigns new control law to be used for computing control/parameter signals.
@param[in] _controlLaw New control law.
- Returns
- SUCCESSFUL_RETURN
Definition at line 192 of file controller.cpp.
| returnValue Controller::setEstimator | ( | Estimator & | _estimator | ) |
Assigns new estimator for estimating quantities required by the control law based on the process output.
- Parameters
-
[in] _estimator New estimator.
- Returns
- SUCCESSFUL_RETURN
Definition at line 209 of file controller.cpp.
| returnValue Controller::setReferenceTrajectory | ( | ReferenceTrajectory & | _referenceTrajectory | ) |
Assigns new reference trajectory to be used by the control law.
@param[in] _referenceTrajectory New reference trajectory.
- Returns
- SUCCESSFUL_RETURN
Definition at line 227 of file controller.cpp.
|
protectedvirtual |
Sets-up default logging information.
- Returns
- SUCCESSFUL_RETURN
Reimplemented from Logging.
Definition at line 558 of file controller.cpp.
|
protectedvirtual |
Sets-up default options.
- Returns
- SUCCESSFUL_RETURN
Reimplemented from Options.
Definition at line 550 of file controller.cpp.
|
virtual |
Performs next step of the contoller based on given inputs.
@param[in] currentTime Current time.
@param[in] _y Most recent process output.
@param[in] _yRef Current piece of reference trajectory or piece of reference trajectory for next step (required for hotstarting).
\note If a non-empty reference trajectory is provided, this one is used
instead of the possibly set-up build-in one.
- Returns
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_CONTROLLER_STEP_FAILED,
RET_NO_CONTROLLAW_SPECIFIED
Definition at line 338 of file controller.cpp.
|
virtual |
Performs next step of the contoller based on given inputs.
@param[in] currentTime Current time.
@param[in] dim Dimension of process output.
@param[in] _y Most recent process output.
@param[in] _yRef Current piece of reference trajectory or piece of reference trajectory for next step (required for hotstarting).
\note If a non-empty reference trajectory is provided, this one is used
instead of the possibly set-up build-in one.
- Returns
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_CONTROLLER_STEP_FAILED,
RET_NO_CONTROLLAW_SPECIFIED
Definition at line 371 of file controller.cpp.
Member Data Documentation
|
protected |
Control law (usually including a dynamic optimizer) to be used for computing the control/parameter signals.
Definition at line 424 of file controller.hpp.
|
protected |
Clock required to determine runtime of control law.
Definition at line 430 of file controller.hpp.
|
protected |
Estimator for estimating quantities required by the control law based on the process output.
Definition at line 425 of file controller.hpp.
|
protected |
Flag indicating whether controller is enabled or not.
Definition at line 428 of file controller.hpp.
|
protected |
Reference trajectory to be used by the control law.
Definition at line 426 of file controller.hpp.
The documentation for this class was generated from the following files: