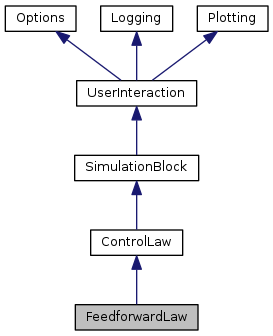
Implements a feedforward law to be used within a Controller. More...
#include <feedforward_law.hpp>
Protected Attributes | |
| uint | nx |
| Curve | uRef |
 Protected Attributes inherited from ControlLaw Protected Attributes inherited from ControlLaw | |
| DVector | p |
| DVector | u |
| Protected Attributes inherited from SimulationBlock | |
| BlockName | name |
| RealClock | realClock |
| double | samplingTime |
| Protected Attributes inherited from UserInteraction | |
| BlockStatus | status |
| Protected Attributes inherited from Options | |
| std::vector< OptionsList > | lists |
| Protected Attributes inherited from Logging | |
| std::vector< LogRecord > | logCollection |
| int | logIdx |
| Protected Attributes inherited from Plotting | |
| PlotCollection | plotCollection |
Detailed Description
Implements a feedforward law to be used within a Controller.
The class FeedforwardLaw allows to implement a predefined feedforward law to be evaluated at the sampling instants.
Definition at line 55 of file feedforward_law.hpp.
Constructor & Destructor Documentation
| BEGIN_NAMESPACE_ACADO FeedforwardLaw::FeedforwardLaw | ( | ) |
Default constructor.
The objective of this class is to be able to use precomputed controls to run a simulation. If the precomputed controls are given as a Curve mycontrols, use: FeedforwardLaw( numberofstates, mycontrols[,sampleTime])
Definition at line 54 of file feedforward_law.cpp.
| FeedforwardLaw::FeedforwardLaw | ( | const uint | _nx, |
| const Curve & | _u, | ||
| double | _samplingTime = DEFAULT_SAMPLING_TIME |
||
| ) |
Constructor which takes the predefined control signals as curve together with the sampling time.
- Parameters
-
[in] _nx Number of differential states. [in] _u Predefined control signal. [in] _samplingTime Sampling time.
Definition at line 60 of file feedforward_law.cpp.
| FeedforwardLaw::FeedforwardLaw | ( | const FeedforwardLaw & | rhs | ) |
Copy constructor (deep copy).
@param[in] rhs Right-hand side object.
Definition at line 71 of file feedforward_law.cpp.
|
virtual |
Destructor.
Definition at line 78 of file feedforward_law.cpp.
Member Function Documentation
|
virtual |
Clone constructor (deep copy).
\return Pointer to deep copy of base class type
Implements ControlLaw.
Definition at line 95 of file feedforward_law.cpp.
|
virtual |
Returns number of parameters.
- Returns
- Number of parameters
Reimplemented from ControlLaw.
Definition at line 166 of file feedforward_law.cpp.
|
virtual |
Returns number of controls.
- Returns
- Number of controls
Reimplemented from ControlLaw.
Definition at line 160 of file feedforward_law.cpp.
|
virtual |
Returns number of (estimated) disturbances.
- Returns
- Number of (estimated) disturbances
Reimplemented from ControlLaw.
Definition at line 172 of file feedforward_law.cpp.
|
virtual |
Returns number of (estimated) differential states.
- Returns
- Number of (estimated) differential states
Reimplemented from ControlLaw.
Definition at line 148 of file feedforward_law.cpp.
|
virtual |
Returns number of (estimated) algebraic states.
- Returns
- Number of (estimated) algebraic states
Reimplemented from ControlLaw.
Definition at line 154 of file feedforward_law.cpp.
|
virtual |
Returns number of process outputs.
- Returns
- Number of process outputs
Reimplemented from ControlLaw.
Definition at line 178 of file feedforward_law.cpp.
|
virtual |
Initializes the feedforward law with given start values and performs a number of consistency checks.
- Parameters
-
[in] _startTime Start time. [in] _x Initial value for differential states. [in] _p Initial value for parameters. [in] _yRef Initial value for reference trajectory.
- Returns
- SUCCESSFUL_RETURN
Implements ControlLaw.
Definition at line 101 of file feedforward_law.cpp.
|
virtual |
Returns whether the control law is based on dynamic optimization or a static one.
- Returns
- BT_TRUE iff control law is based on dynamic optimization,
BT_FALSE otherwise
Implements ControlLaw.
Definition at line 184 of file feedforward_law.cpp.
|
virtual |
Returns whether the control law is a static one or based on dynamic optimization.
- Returns
- BT_TRUE iff control law is a static one,
BT_FALSE otherwise
Implements ControlLaw.
Definition at line 190 of file feedforward_law.cpp.
| FeedforwardLaw & FeedforwardLaw::operator= | ( | const FeedforwardLaw & | rhs | ) |
Assignment operator (deep copy).
@param[in] rhs Right-hand side object.
Definition at line 83 of file feedforward_law.cpp.
|
virtual |
Performs next step of the feedforward law based on given inputs.
@param[in] currentTime Current time. @param[in] _x Most recent value for differential states. @param[in] _p Most recent value for parameters. @param[in] _yRef Current piece of reference trajectory.
- Returns
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_VECTOR_DIMENSION_MISMATCH,
RET_CONTROLLAW_STEP_FAILED
Implements ControlLaw.
Definition at line 119 of file feedforward_law.cpp.
Member Data Documentation
|
protected |
Number of differential states.
Definition at line 202 of file feedforward_law.hpp.
|
protected |
Predefined control signal.
Definition at line 203 of file feedforward_law.hpp.
The documentation for this class was generated from the following files: