#include <ScavTask.h>
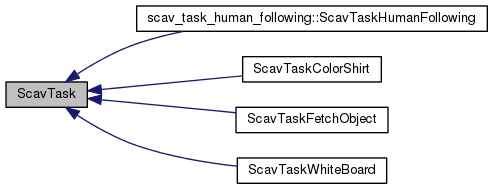
Inheritance diagram for ScavTask:
Public Member Functions | |
| virtual void | executeTask (int timeout, TaskResult &result, std::string &record)=0 |
| virtual void | stopEarly ()=0 |
Public Attributes | |
| std::string | certificate |
| ros::NodeHandle * | nh |
| std::string | task_description |
| std::string | task_name |
| std::vector< std::string > | task_parameters |
Static Public Attributes | |
| static const float | tolerance = 0.5 |
Detailed Description
Definition at line 9 of file ScavTask.h.
Member Function Documentation
| virtual void ScavTask::executeTask | ( | int | timeout, |
| TaskResult & | result, | ||
| std::string & | record | ||
| ) | [pure virtual] |
Implemented in ScavTaskColorShirt, scav_task_human_following::ScavTaskHumanFollowing, ScavTaskWhiteBoard, and ScavTaskFetchObject.
| virtual void ScavTask::stopEarly | ( | ) | [pure virtual] |
Implemented in ScavTaskColorShirt, scav_task_human_following::ScavTaskHumanFollowing, ScavTaskWhiteBoard, and ScavTaskFetchObject.
Member Data Documentation
| std::string ScavTask::certificate |
Definition at line 17 of file ScavTask.h.
Definition at line 13 of file ScavTask.h.
| std::string ScavTask::task_description |
Definition at line 15 of file ScavTask.h.
| std::string ScavTask::task_name |
Definition at line 16 of file ScavTask.h.
| std::vector<std::string> ScavTask::task_parameters |
Definition at line 20 of file ScavTask.h.
const float ScavTask::tolerance = 0.5 [static] |
Definition at line 19 of file ScavTask.h.
The documentation for this class was generated from the following file: