#include <Algorithm.h>
Public Member Functions | |
| virtual double | CheckSignature (const Signature &object, const std::vector< Sensor * > &sensors)=0 |
| evaluate shortly of the signature contains necessary model information to perform the algorithm | |
| virtual std::string | GetName () |
| virtual XMLTag * | Save ()=0 |
| saves the algorithms name and a parameter set | |
| virtual void | Show (Sensor *) |
Public Attributes | |
| AlgorithmID_t | m_AlgIndex |
Definition at line 38 of file Algorithm.h.
| virtual double cop::Evaluable::CheckSignature | ( | const Signature & | object, |
| const std::vector< Sensor * > & | sensors | ||
| ) | [pure virtual] |
evaluate shortly of the signature contains necessary model information to perform the algorithm
CheckSignature
| object | the signature that has to be checked |
| sensors | a list of available sensors seeing the target area |
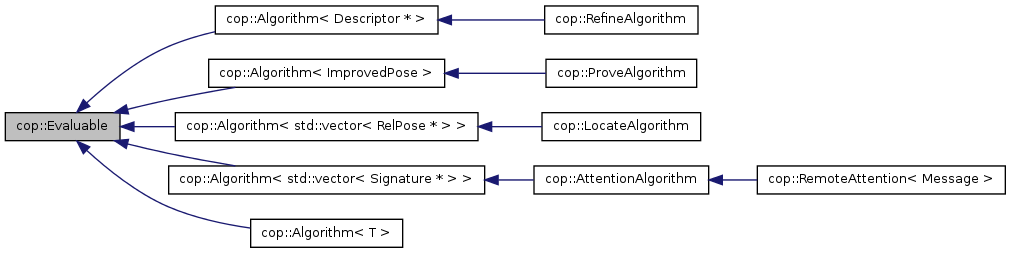
Implemented in cop::RemoteAttention< Message >, cop::AttentionAlgorithm, cop::LocateAlgorithm, cop::ProveAlgorithm, and cop::RefineAlgorithm.
| virtual std::string cop::Evaluable::GetName | ( | ) | [inline, virtual] |
Reimplemented in cop::ProveAlgorithm, and cop::RefineAlgorithm.
Definition at line 58 of file Algorithm.h.
| virtual XMLTag* cop::Evaluable::Save | ( | ) | [pure virtual] |
saves the algorithms name and a parameter set
Save
Implemented in cop::RemoteAttention< Message >, cop::AttentionAlgorithm, cop::LocateAlgorithm, cop::ProveAlgorithm, and cop::RefineAlgorithm.
| virtual void cop::Evaluable::Show | ( | Sensor * | ) | [inline, virtual] |
Show: show the algorithm results in a camera
Definition at line 54 of file Algorithm.h.
Definition at line 65 of file Algorithm.h.

