#include "fields2cover/types.h"#include "fields2cover/utils/random.h"#include "fields2cover/utils/spline.h"#include "fields2cover/utils/transformation.h"#include "fields2cover/utils/parser.h"#include "fields2cover/utils/visualizer.h"#include "fields2cover/objectives/base_objective.h"#include "fields2cover/objectives/hg_obj/hg_objective.h"#include "fields2cover/objectives/hg_obj/rem_area.h"#include "fields2cover/objectives/sg_obj/sg_objective.h"#include "fields2cover/objectives/sg_obj/n_swath.h"#include "fields2cover/objectives/sg_obj/n_swath_modified.h"#include "fields2cover/objectives/sg_obj/field_coverage.h"#include "fields2cover/objectives/sg_obj/overlaps.h"#include "fields2cover/objectives/sg_obj/swath_length.h"#include "fields2cover/objectives/rp_obj/rp_objective.h"#include "fields2cover/objectives/rp_obj/direct_dist_path_obj.h"#include "fields2cover/objectives/rp_obj/complete_turn_path_obj.h"#include "fields2cover/objectives/pp_obj/pp_objective.h"#include "fields2cover/objectives/pp_obj/path_length.h"#include "fields2cover/objectives/decomp_obj/decomp_objective.h"#include "fields2cover/decomposition/decomposition_base.h"#include "fields2cover/decomposition/trapezoidal_decomp.h"#include "fields2cover/decomposition/boustrophedon_decomp.h"#include "fields2cover/headland_generator/headland_generator_base.h"#include "fields2cover/headland_generator/constant_headland.h"#include "fields2cover/swath_generator/swath_generator_base.h"#include "fields2cover/swath_generator/brute_force.h"#include "fields2cover/route_planning/single_cell_swaths_order_base.h"#include "fields2cover/route_planning/boustrophedon_order.h"#include "fields2cover/route_planning/snake_order.h"#include "fields2cover/route_planning/spiral_order.h"#include "fields2cover/route_planning/custom_order.h"#include "fields2cover/route_planning/route_planner_base.h"#include "fields2cover/path_planning/turning_base.h"#include "fields2cover/path_planning/dubins_curves.h"#include "fields2cover/path_planning/dubins_curves_cc.h"#include "fields2cover/path_planning/reeds_shepp_curves.h"#include "fields2cover/path_planning/reeds_shepp_curves_hc.h"#include "fields2cover/path_planning/path_planning.h"
Include dependency graph for fields2cover.h:
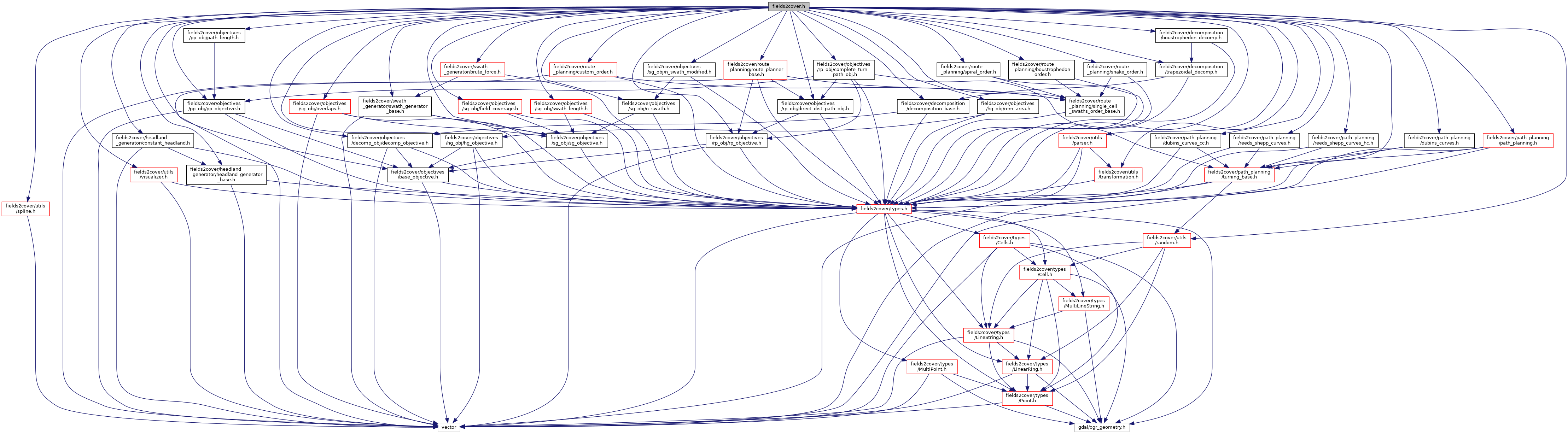
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | f2c::Options |
Namespaces | |
| f2c | |
| Main namespace of the fields2cover library. | |
| f2c::decomp | |
| Decomposition algorithms' namespace. | |
| f2c::hg | |
| Headland generator algorithms' namespace. | |
| f2c::obj | |
| Objective algorithms' namespace. | |
| f2c::pp | |
| Path planning algorithms' namespace. | |
| f2c::rp | |
| Route planning algorithms' namespace. | |
| f2c::sg | |
| Swath generator algorithms' namespace. | |
| f2c::types | |
| Types used by fields2cover library. | |
Macros | |
| #define | FIELDS2COVER_H_ |
Enumerations | |
| enum | f2c::DecompAlg { f2c::DecompAlg::NONE = 0 } |
| enum | f2c::HGAlg { f2c::HGAlg::NONE = 0, f2c::HGAlg::CONST = 1 } |
| enum | f2c::PPAlg { f2c::PPAlg::DUBINS = 0, f2c::PPAlg::DUBINS_CC = 1, f2c::PPAlg::REEDS_SHEPP = 2, f2c::PPAlg::REEDS_SHEPP_HC = 3 } |
| enum | f2c::RPAlg { f2c::RPAlg::SHORTEST_ROUTE = 0 } |
| enum | f2c::SGAlg { f2c::SGAlg::BRUTE_FORCE = 0, f2c::SGAlg::GIVEN_ANGLE = 1 } |
| enum | f2c::SGObjFunc { f2c::SGObjFunc::N_SWATH_MOD = 0, f2c::SGObjFunc::N_SWATH = 1, f2c::SGObjFunc::SWATH_LENGTH = 2, f2c::SGObjFunc::FIELD_COV = 3, f2c::SGObjFunc::OVERLAPS = 4 } |
Functions | |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CCell &cell, const Options &opt=Options()) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CCells &cells, const Options &opt=Options()) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CField &field, bool local_crs) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CField &field, const Options &opt=Options(), bool local_crs=true) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CCell &cell, const Options &opt=Options()) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CCells &cells, const Options &opt=Options()) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CField &field, bool local_crs) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CField &field, const Options &opt=Options(), bool local_crs=true) |
Macro Definition Documentation
◆ FIELDS2COVER_H_
| #define FIELDS2COVER_H_ |
Definition at line 9 of file fields2cover.h.