#include <pose_msg.h>
|
| void | parseMessageImpl (const geometry_msgs::PoseWithCovarianceStamped &msg, double ×tamp) override |
| |
| | PoseCovarianceStampedMsgParser (const std::string &topic_name, PJ::PlotDataMapRef &plot_data) |
| |
| | BuiltinMessageParser (const std::string &topic_name, PJ::PlotDataMapRef &plot_data) |
| |
| | BuiltinMessageParser (const std::string &topic_name, PlotDataMapRef &plot_data) |
| |
| bool | parseMessage (MessageRef serialized_msg, double ×tamp) override |
| |
| virtual bool | parseMessage (MessageRef serialized_msg, double ×tamp) |
| |
| | Ros2MessageParser (const std::string &topic_name, PJ::PlotDataMapRef &plot_data) |
| |
| const rosidl_message_type_support_t * | typeSupport () const |
| |
| const RosParserConfig & | getConfig () const |
| |
| PJ::PlotData & | getSeries (const std::string &key) |
| |
| PJ::StringSeries & | getStringSeries (const std::string &key) |
| |
| | RosMessageParser (const std::string &topic_name, PJ::PlotDataMapRef &plot_data) |
| |
| void | setConfig (const RosParserConfig &config) |
| |
| bool | clampLargeArray () const |
| |
| unsigned | maxArraySize () const |
| |
| | MessageParser (const std::string &topic_name, PlotDataMapRef &plot_data) |
| |
| virtual bool | parseMessage (const MessageRef serialized_msg, double ×tamp)=0 |
| |
| virtual void | setLargeArraysPolicy (bool clamp, unsigned max_size) |
| |
| virtual | ~MessageParser ()=default |
| |
Definition at line 88 of file ros1_parsers/pose_msg.h.
◆ PoseCovarianceStampedMsgParser()
| PoseCovarianceStampedMsgParser::PoseCovarianceStampedMsgParser |
( |
const std::string & |
topic_name, |
|
|
PJ::PlotDataMapRef & |
plot_data |
|
) |
| |
|
inline |
◆ parseMessageImpl()
| void PoseCovarianceStampedMsgParser::parseMessageImpl |
( |
const geometry_msgs::PoseWithCovarianceStamped & |
msg, |
|
|
double & |
timestamp |
|
) |
| |
|
inlineoverridevirtual |
◆ _header_parser
◆ _pose_cov_parser
The documentation for this class was generated from the following file:
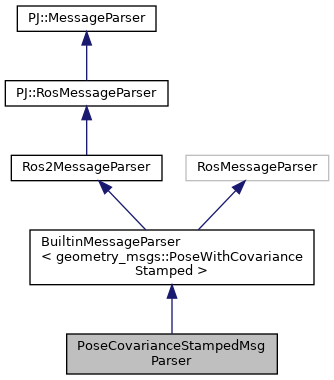
 Public Member Functions inherited from BuiltinMessageParser< geometry_msgs::PoseWithCovarianceStamped >
Public Member Functions inherited from BuiltinMessageParser< geometry_msgs::PoseWithCovarianceStamped >